6.7.1 Internal torque limit
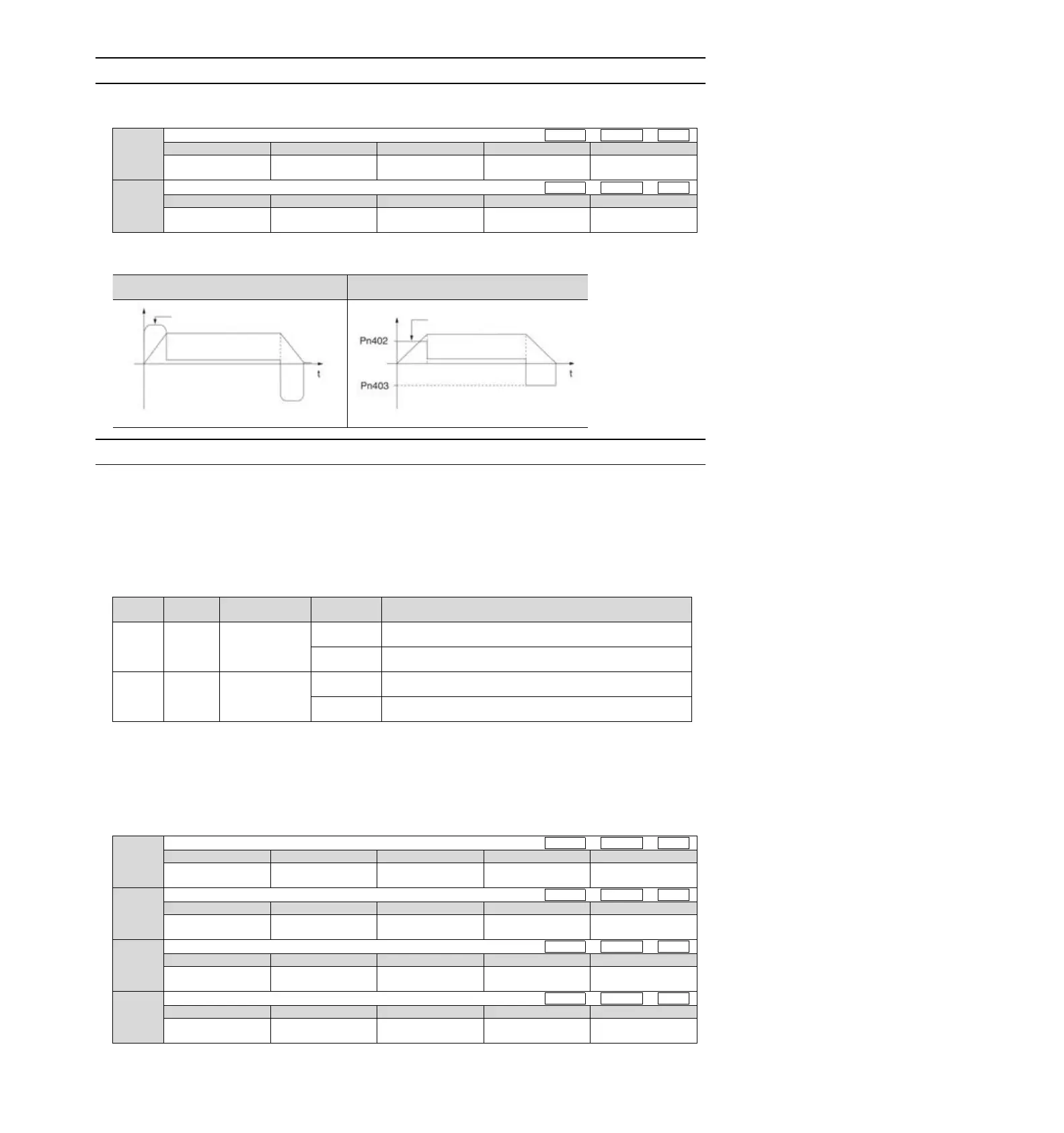
The internal torque limit limits the maximum output torque at a constant time by the torque limit values set by
the forward torque limit (Pn402) and the reverse torque limit (Pn403).
Forward rotation torque limit
* Percentage relative to rated torque of motor.
(Note) If the set values of Pn402 and Pn403 are too small, insufficient torque may occur during acceleration and deceleration of the
servo motor.
No internal torque limit (maximum torque
output)
There is internal torque limit
6.7.2 Exterior torque limit
When the machine needs torque limitation under certain operating conditions, the upper device sends an ON
or OFF signal to implement torque limitation.
It can be used for pushing and stopping action or holding the workpiece of the robot stably.
Command signal for external torque limitation
The command signals for external torque limitation include a forward rotation side external torque limitation
input (/P-CL) signal and a reverse rotation side external torque limitation input (/N-CL) signal. The command
signal for forward rotation side torque limitation is /P-CL signal, and the command signal for reverse rotation
side torque limitation is /N-CL signal.
The external torque ON the forward rotation side is limited to ON.
Limit value: the smaller of the set values of Pn402 and Pn404
The external torque on the forward rotation side is limited to OFF.
Limit value: Pn402
The external torque ON the reversal side is limited to ON.
Limit value: the smaller of the set values of Pn403 and Pn404
The external torque on the reversal side is limited to OFF.
Limit value: Pn403
(Note) /P- CL signal,/N- CL signal needs to be distributed. The following parameters can be used to assign to terminals.
• Pn50B = n.
X
(distribution of external torque limit input (/P-CL) signal on forward rotation side)
• Pn50B = n.X
(distribution of reverse side external torque limit input (/N-CL) signal)
Setting of torque limit
The parameters related to the set torque limit value are as follows.
If the set values of Pn402 (forward rotation torque limit), Pn403 (reverse rotation torque limit), Pn404 (forward
rotation side external torque limit), and Pn405 (reverse rotation side external torque limit) are too small,
insufficient torque may occur during acceleration and deceleration of the servo motor.
Forward rotation torque limit
Forward rotation torque limit
* Percentage relative to rated torque of motor.