6.1.6 Ready output (/S-RDY) signal
The servo ready output (/S-RDY) signal turns ON in a state where the servo drive can receive a servo ON
(SV_ON) command.
The /S-RDY signal is output (turned ON) under the following conditions.
Main circuit power supply ON.
Non-hardware base blocking state.
No alarm has occurred.
When the absolute value encoder is used, the sensor ON (SENS_ON) command is input.
Magnetic Pole Detection Completed (Servo Motor Without Magnetic Pole Sensor)
When using the absolute value encoder, in addition to the above state, the servo ready signal can be output
only under the condition that "the position data of the absolute value encoder has been output to the upper
device when the sensor ON (SENS_ON) command is input".
* This condition is excluded when the servo ON (SV_ON) command is input for the first time after the control
power is turned on. In this case, when the SV_ON command is input, the magnetic pole detection will start
synchronously with the first SV_ON command, and after the magnetic pole detection is completed, the
/S-RDY signal will be ON.
State in which servo ON (SV_ON) command can
be received
The state in which the servo ON (SV_ON)
command cannot be received.
(Note) /S-RDY signal can be distributed. It can be set to Pn50E = n. X
(distribution of servo ready output (/S-RDY) signal) and
distributed to terminals.
6.1.7 Speed consistent output (/V-CMP) signal
The speed coincidence output (/V-CMP) signal is a signal output when the rotational speed of the servo motor
coincides with the commanded speed. Used for interlocking with the upper device and other occasions. This
output signal can only be used for speed control.
/V-CMP signal is shown below.
Velocity consistent state
(Note) /V-CMP signal needs to be distributed. It can be set to Pn50E= n.
X
(distribution of speed consistent output
(/V-CMP) signal) and distributed to terminals.
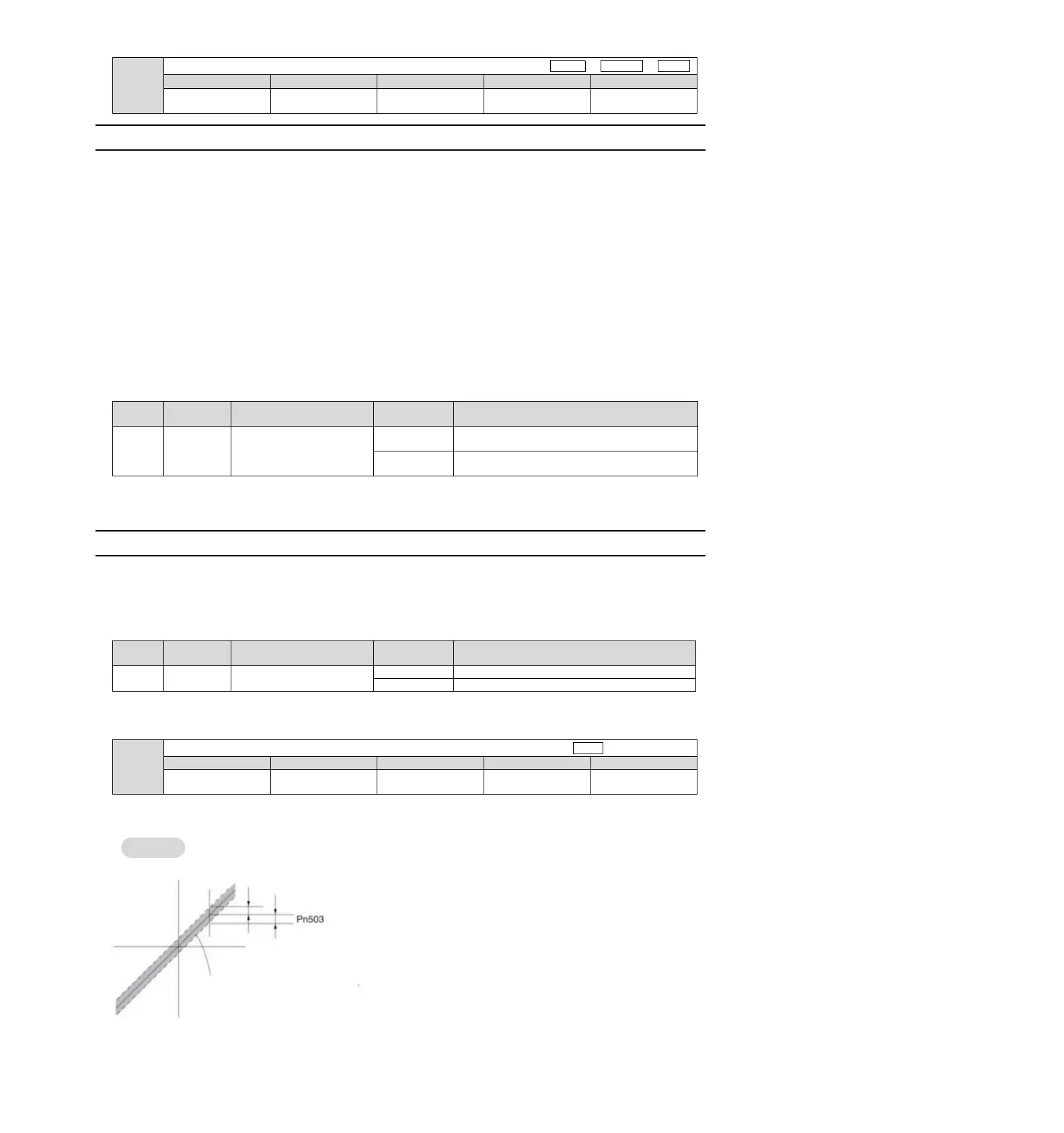
The speed detection range of the /V-CMP signal is set by Pn503.
Detection range of speed consistent signals
When the difference between the motor speed and the commanded speed is lower than the set value, the
signal is output.
Pn503=100, output signal when the command speed is 2000min
-1
and the motor speed is 1900 ~ 2100 min
-1
.
The "/V-CMP signal" is output when the motor
speed changes to the speed within the range
enclosed by the dotted line.