The brake built in the servo motor is a fixed special brake with no excitation action and cannot be used for
braking purposes. Please only use it when the servo motor is stopped.
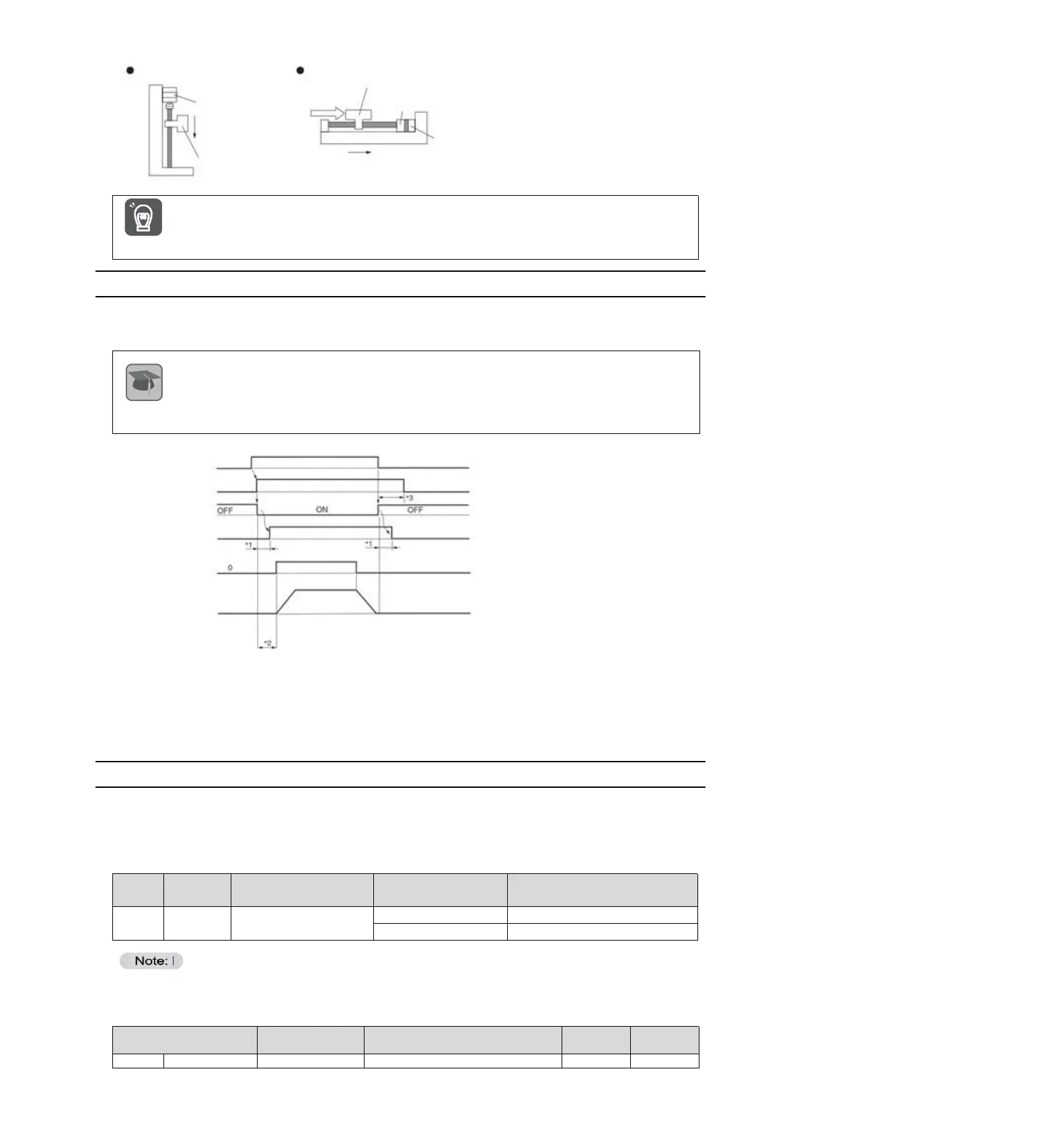
5.9.1 Action sequence of brake
Considering the opening time and operating time of the brake, please set the operating time of the brake as
follows.
Brake opening time
The time between when the brake cONtrol output (/BK) signal is turned on and when the brake is actually
turned on.
Brake action time
The time from when the brake control output (/BK) signal is turned OFF to when the brake actually operates.
*1. The brake action of servo motor with brake will have a delay time, which is determined by the electrical characteristics of the
brake.
*2. After SV_ON command is sent, please wait for the brake to be on for more than +50ms before outputting the commands of the
upper device to servo drive.
*3. Please use the following parameters to set the brake action and servo OFF time.
Pn506 (brake command-servo OFF delay time), Pn507 (brake command output speed value), Pn508 (servo OFF- brake
command wait time)
5.9.2 Brake Control Output (/BK) Signal
Control the output signal of the brake. The connector pin number of the allocation target can be changed.
Please refer to "Distribution of Brake Control Output (/BK) Signal" for details. When the servo is OFF or
an alarm is detected, the /BK signal is OFF (brake action). The time when the brake is operated (the time
when the /BK signal is turned OFF) is adjusted by the servo OFF delay time (Pn506).
The /BK signal remains ON in the overtravel state. At this time, the brake is released.
Distribution of brake control output (/BK) signal
Distribution of /BK signal is set by PN50F = n.
X
(distribution of brake control output (/BK) signal).
Output /BK signal from CN1-OUT0
Prevent power supply
from falling due to dead
weight when OFF
The moving part of a
machine
Axis subject to external
force
The moving part of a
machine
The movable part of the machine is
prevented from moving due to external force
Electrical machine
energized state
Brake Control Output
(/BK) Signal
Position and speed
command