Chapter 6 Function Introduction Shenzhen Hpmont Technology Co., Ltd.
- 60 - HD3N Series User Manual V1.1
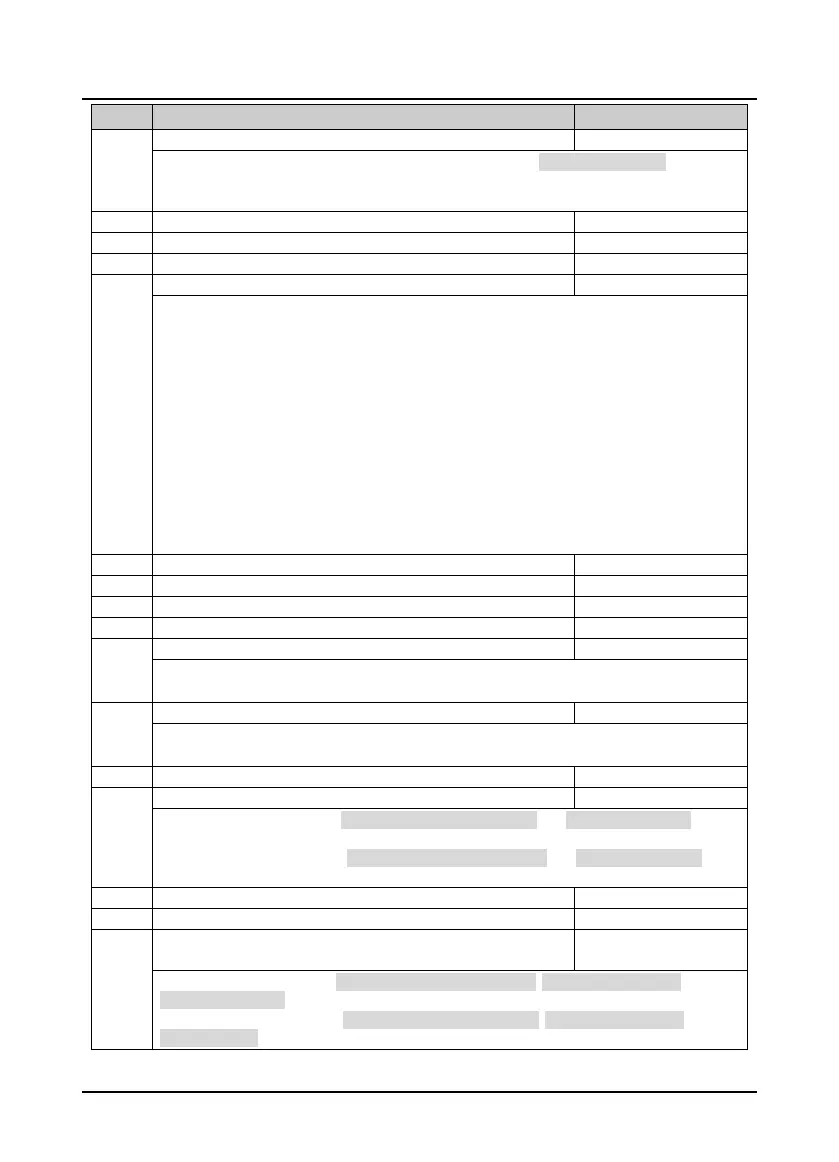
Ref. code Function Description Setting Range [Default]
REV frequency upper limit of PID output
Defines the frequency upper limit when reverse at PID. It is valid when F04.18 = 1 (permit REV).
• When PID serves as aux frequency setting channel, F04.19 is invalid, upper limit is set by F19.35 and
F19.36.
PID parameter adjustment bases
0: Do not adjust. Second PID is invalid.
1: DI.
• Switch PID parameter according to DI terminal No. 59 function. When the terminal is invalid, select
group 1 (F04.04, F04.05, F04.07); when valid, select group 2 (F04.20 - F04.22).
2: Bias.
• Select group 2 when bias between PID feedback and PID setting< switching point 1 (F04.24);
• Select group 1 when bias between PID feedback and PID setting> switching point 1 (F04.25);
• Select linear interpolation when bias between PID feedback and PID setting is within switching point 1
and 2.
3: Frequency.
• Select group 1 when PID output frequency<switching point 1 (F04.24);
• Select group 2 when PID output frequency> switching point 2 (F04.25);
Select linear interpolation when PID output frequency is within switching point 1 and 2.
PID parameter switching point 1
PID parameter switching point 2
0: Do not calculate when HD3N stops.
1: Calculate when HD3N stops.
F04.30 PID dormancy selection 0,1 [0]
0: Disable.
1: Enable.
Positive: in dormant status, when feedback
≤
setting
×
(100% - F04.31), and counting time
≥
F04.32, wake
up HD3N;
Negative: in dormant status, when feedback
≥
setting
×
(100% + F04.31), and counting time
≥
F04.32, wake
up HD3N.
F04.35 Dormancy frequency 0.00 - max. frequency
Positive: in wakeup status, when feedback
≥
setting
×
(100% + F04.33), target frequency
≤
F04.35 and
counting time
≥
F04.34, HD3N is dormant;
Negative: in wakeup status, when feedback
≤
setting
×
(100% - F04.33), target frequency
≤
F04.35 and
counting
≥
F04.34, HD3N is dormant.

 Loading...
Loading...

