Shenzhen Hpmont Technology Co., Ltd. Chapter 6 Function Introduction
HD3N Series User Manual V1.1 - 71 -
6.2.11 F10: Motor Vector Control Speed-loop Parameters
Ref. code Function Description Setting Range [Default]
Proportional gain 1 of motor speed control
Integral time 1 of motor speed control
Proportional gain 2 of motor speed control
F10.03 Integral time 2 of motor speed control 0.00 - 10.00 [0.20s]
Switching frequency 1 of motor speed loop
Switching frequency 2 of motor speed loop
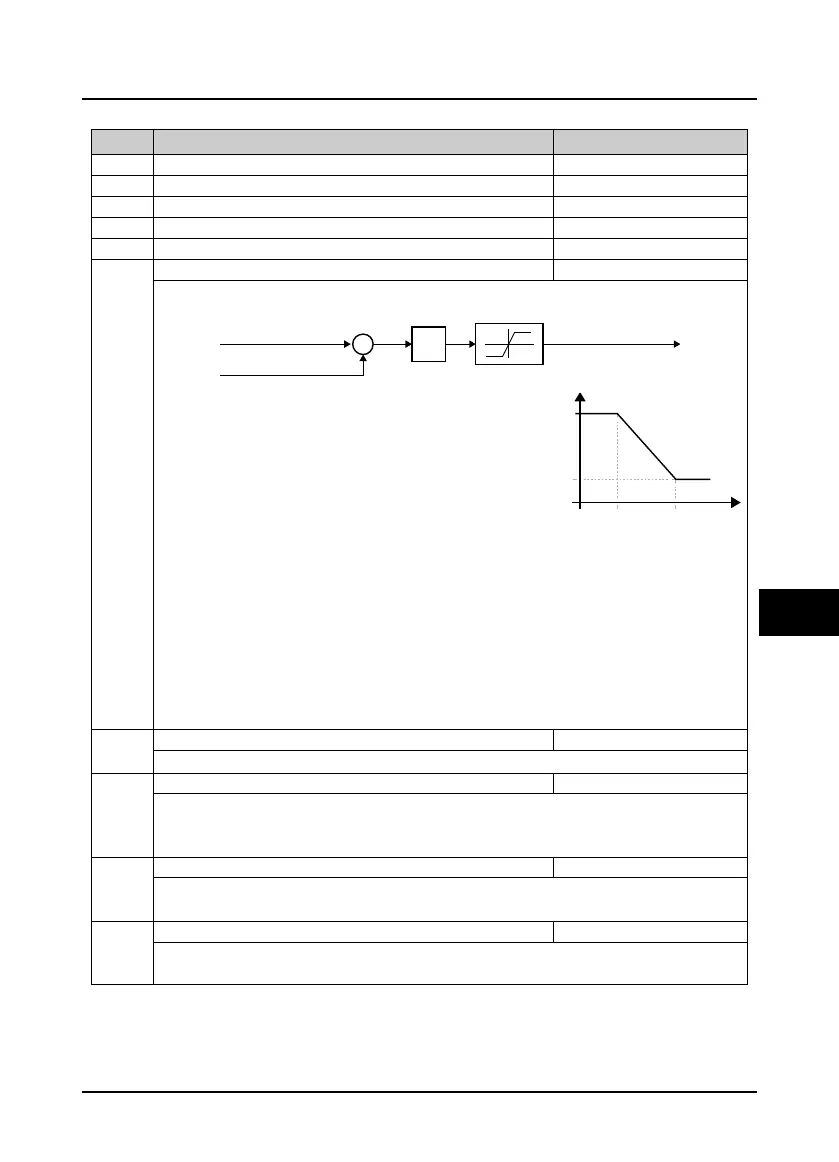
F10.00 - F10.05, F10.07 set the PID parameter of speed regulator (ASR). The structure of ASR is shown in
figure:
As the right figure:
• When HD3N operates within 0 - F10.04, the PI parameters of
vector control are F10.00 and F10.01;
• When HD3N operates above F10.05, the PI parameters of vector
control are F10.02 and F10.03;
• When HD3N operates within F10.04 - F10.05, P is the linear
interpolation between F10.00 and F10.02, while I is the linear
interpolation between F10.01 and F10.03.
• The system response can be expedited through increasing proportional gain P, but oscillation may occur
if the value of P is too high.
• The system response can be expedited through decreasing ASR integral time Ti, but oscillation and big
overshoot may occur if the value of Ti is too smaal.
• If integral time constant = 0, intergral function is not effective, and speed loop is merely a propotional
regulator.
• Generally, adjust proportional gain P first to the max. condition that the system does not vibrate, and
then adjust the Ti to shorten the response time without overshoot.
• To shorten dynamic response time during low frequency running, increase proportional gain and
decrease Ti.
0.0 - 200.0 (F08.02) [180.0%]
It is used to limit the max. value of the vector control speed-loop integral.
Motor speed loop differential time
Defines the vector control speed-loop differential time.
• Generally do not set F10.07. But to quicken system response, user can properly set it.
• F10.07 = 0, there is no speed-loop differential.
Motor speed loop otuput filter time
It is used to filter the output of ASR regulator.
• F10.08 = 0, the speed-loop filter is unused.
Locking selection for motor torque limit
0: Do not lock.
1: All of the torque limit is same with FWD electric torque limit.
Frequency feedback
Frequency command
Error
PID
Torque limit
Torque current setting
+
-
F10.04 F10.05
F10.00 /
F10.01
F10.02 /
F10.03
0
Frequency
PI parameter

 Loading...
Loading...

