Setting Motor Zero Position
For the drive operation in absolute positioning mode (without a new homing sequence after each drive power up),
proceed as described below.
1) Check that the encoder 0 position is outside the axis travel range by using the object 0x312D,3 (encoder
position read)
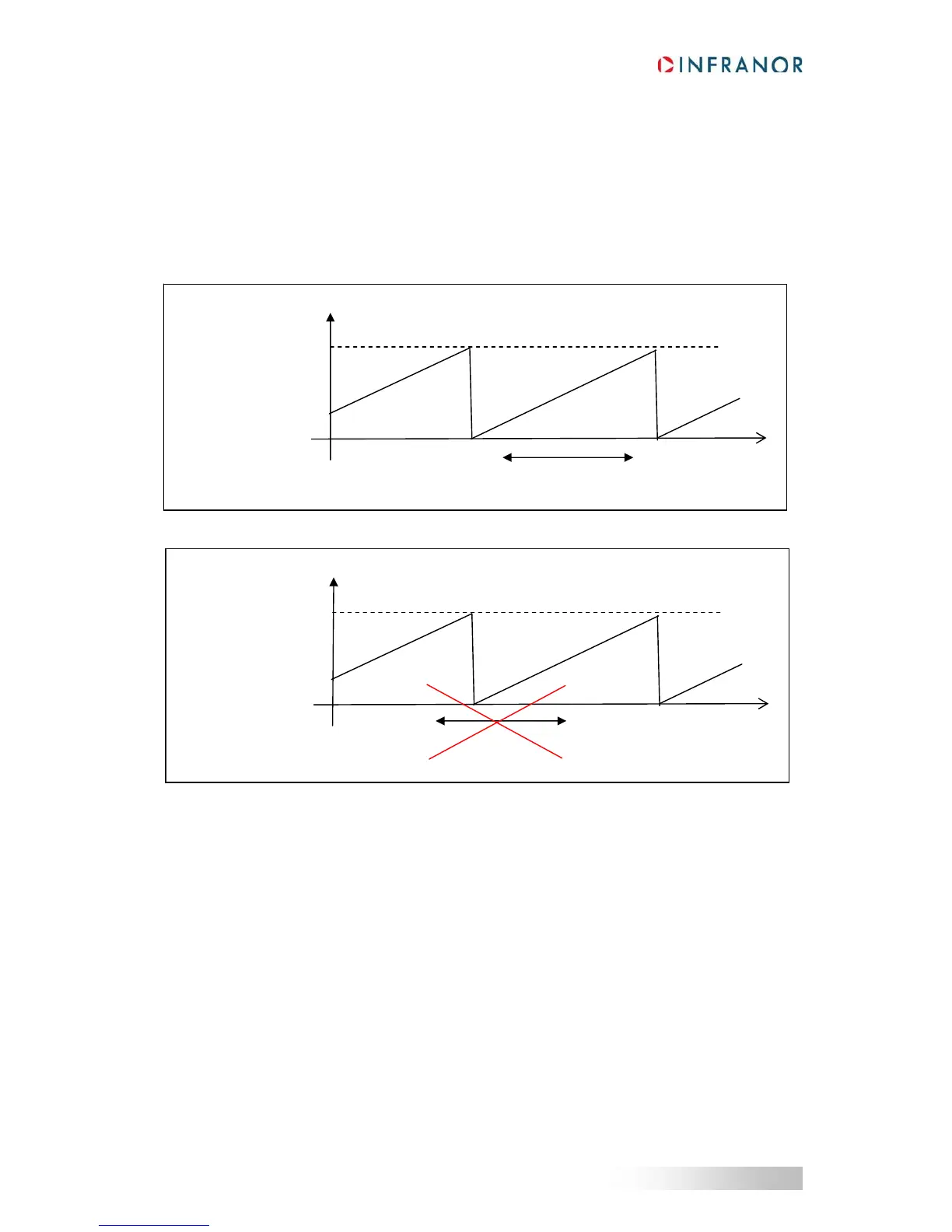
An absolute encoder gives a position value between 0 and the maximum position value (encoder modulo). So, for
an absolute positioning application, the encoder 0 position must be out of the axis travel range as shown below.
Correct encoder absolute position range adjustment
Wrong encoder absolute position range adjustment
If the encoder 0 position is inside the axis travel range, uncouple the motor and adjust manually the encoder
position range.
2) Adjust the motor position range by using the object 0x312B,1 (reset motor position)
The displayed motor position range can be adjusted according to the application with:
- a positive value only
- or a negative value only
- or bipolar value.
Encoder absolute position value
0
Max. position value
(Encoder modulo)
Axis travel range
Axis position
Encoder absolute position value
0
Max. position value
(Encoder modulo)
Axis travel range
Axis position
 Loading...
Loading...

