Goodrive35 Series Closed-loop Vector Control VFD Function parameters
55
Detailed instruction of parameters
0: Decelerate to stop: after the stop command
becomes valid, the VFD decelerates to decrease the
output frequency during the set time. When the
frequency decreases to P01.15, the VFD stops.
1: Coast to stop: after the stop command becomes
valid, the VFD ceases the output immediately. And
the load coasts to stop at the mechanical inertia.
Starting frequency of
DC brake
The starting frequency of stop brake: The VFD will
carry on stop DC brake when the frequency is
arrived during the procedure of decelerating to stop.
Demagnetizing time: Before the stop DC brake, the
VFD will close output and begin to carry on the DC
brake after the waiting time. This function is used to
avoid the overcurrent fault caused by DC brake
when the speed is too high.
Stop DC brake current: the DC brake added. The
stronger the current, the bigger the DC brake effect.
The brake time of stop brake: the retention time of
DC brake. If the time is 0, the DC brake is invalid.
The VFD will stop at the set deceleration time.
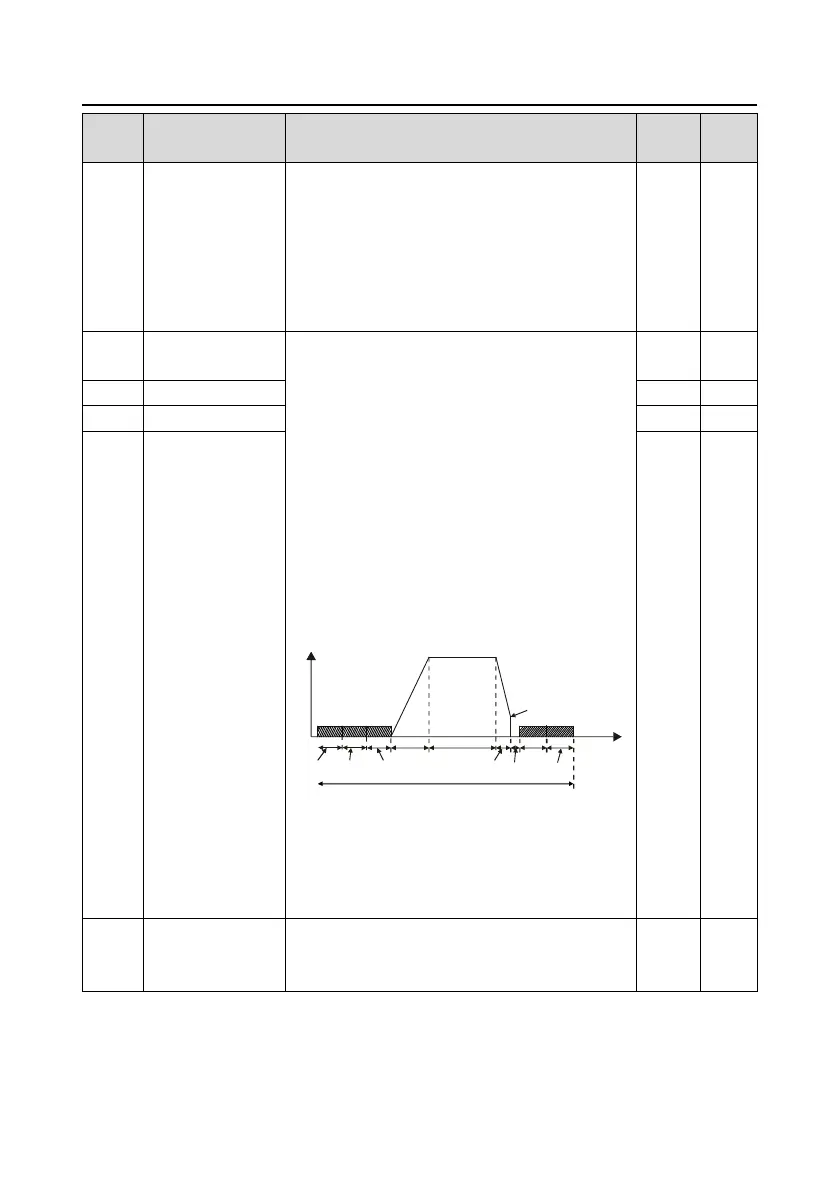
P01.04
Acceleration
P13.14
P01.23
Constant speed
In running
Deceleration
P01.10
P13.15
P01.12
P01.09
Time t
Setting range of P01.09: 0.00 Hz–P00.03 (max.
output frequency)
Setting range of P01.10: 0.00–30.00s
Setting range of P01.11: 0.0–100.0%
Setting range of P01.12: 0.0–50.0s
Dead time of
FWD/REV rotation
During the procedure of switching for/rev rotation,
set the threshold by P01.14, which is as the table
below:
 Loading...
Loading...
