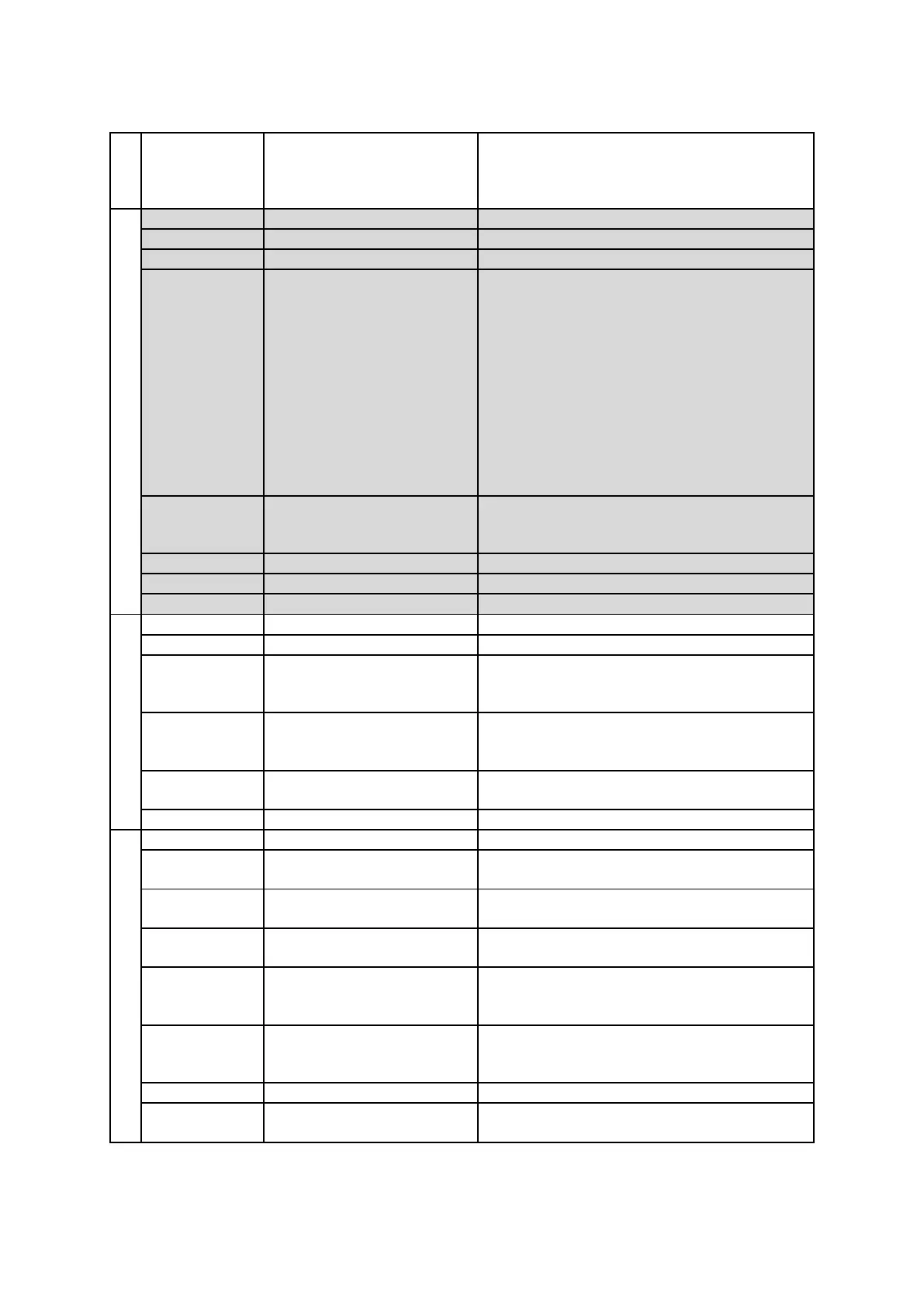
Category
Command Necessary Parameter Description
Move
lineMove
Speed, Movement/Rotation
Distance of Each Axis
Make an axis move a specified distance
(relative distance) at a specified speed in a CP
line movement (relative move command).
Entering this command displays the specified
speeds, directions and distances of each axis
as follows:
Example:
lineMoveSpeed 20
lineMoveX 10
lineMoveY 20
lineMoveZ 0
lineMoveStopIf
Term inate a n axis movement made by
lineMove mid-movement if the conditions are
End of lineMoveStopIf condition statements.
Initialize the specified axis.
LCD, 7SLED
Clear a specified line on the LCD display.
outLCD
Display Column (1 – 40),
Display strings on the LCD display.
eoutLCD
Display Column (1 – 40),
Display the expression result on the LCD
display.
sys7SLED –
Return the 7 segment LED display changed
by out7SLED.
COM Input/Output
Character string output from COM.
eoutCOM
Port, Character String
Expression
Equation result output from COM.
setWTCOM Port, Wait Time
Set a COM wait time (time-out period) for
receiving data.
inCOM
Variable Name, Port,
Character Length
Assign the received data from COM to a
specified variable.
cmpCOM Port, Character String
Compare the received data and the string. The
result is entered into the system flags
(sysFlag(1) – sysFlag(15)).
ecmpCOM
Port, Character String
Expression
Compare the received data and string
expression. The result is entered into the
system flags (sysFlag(1) – sysFlag(15)).
Clear the COM receive buffer.
shiftCOM Port, Shift Number
Shift data received from COM. Delete the
amount of byte data shifted, from the top.
108
 Loading...
Loading...


