9 Tuning (optimization)
66
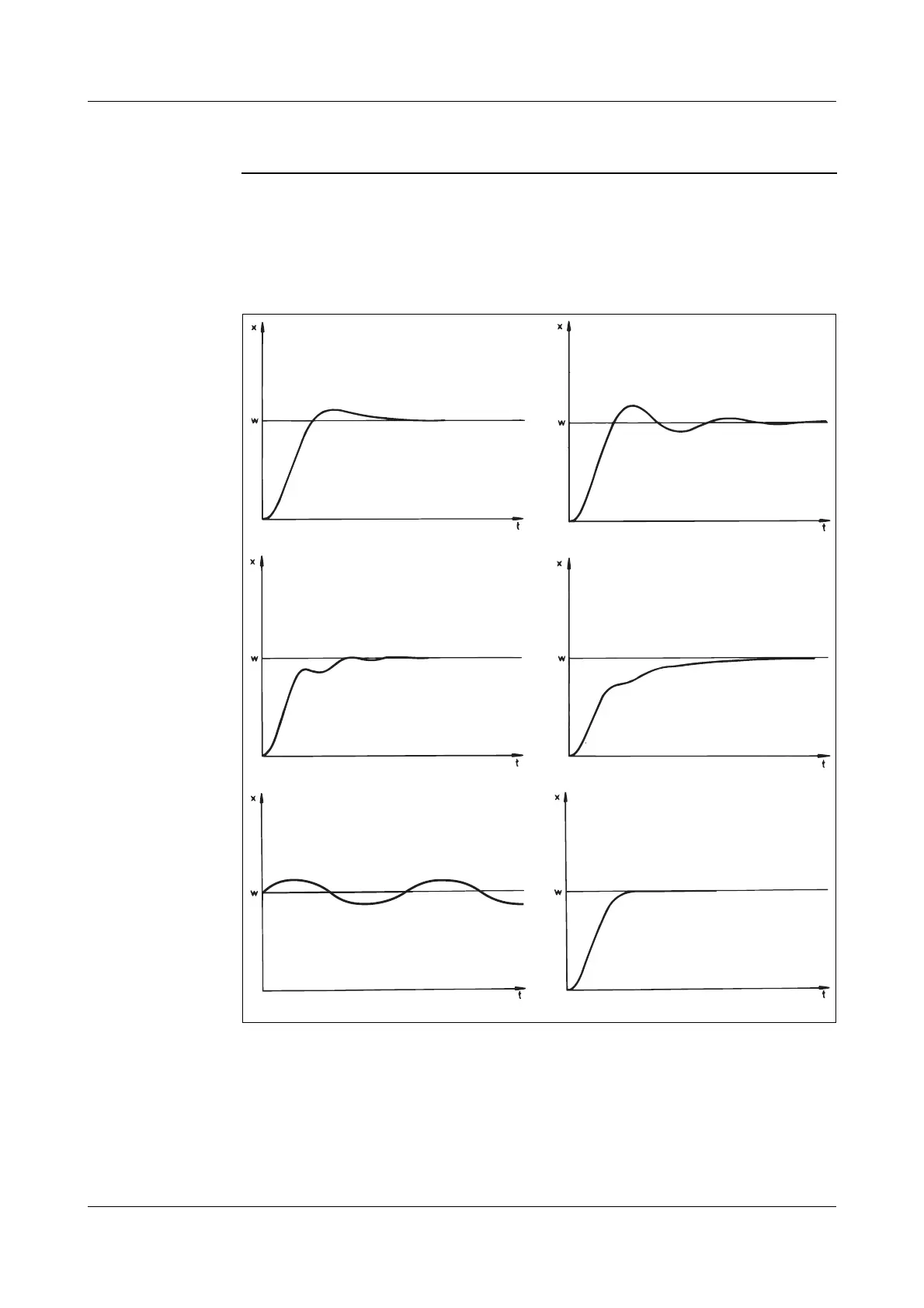
9.2 Check of the tuning
The optimum adaptation of the controller to the process can be checked by recording
the approach phase (e.g. with Startup) with the control loop closed. The diagrams
below indicate possible maladjustments and how these can be corrected.
The control response of a third-order control loop for a PID controller is shown as an
example. However, the procedure for adjusting the controller parameters can also be
applied to other control loops.
Pb too large
Pb too small
rt, dt too large
rt, dt too small
optimum
adjustment
Cy too large