Fig 4-15 Wiring method 1 of output terminal Y2
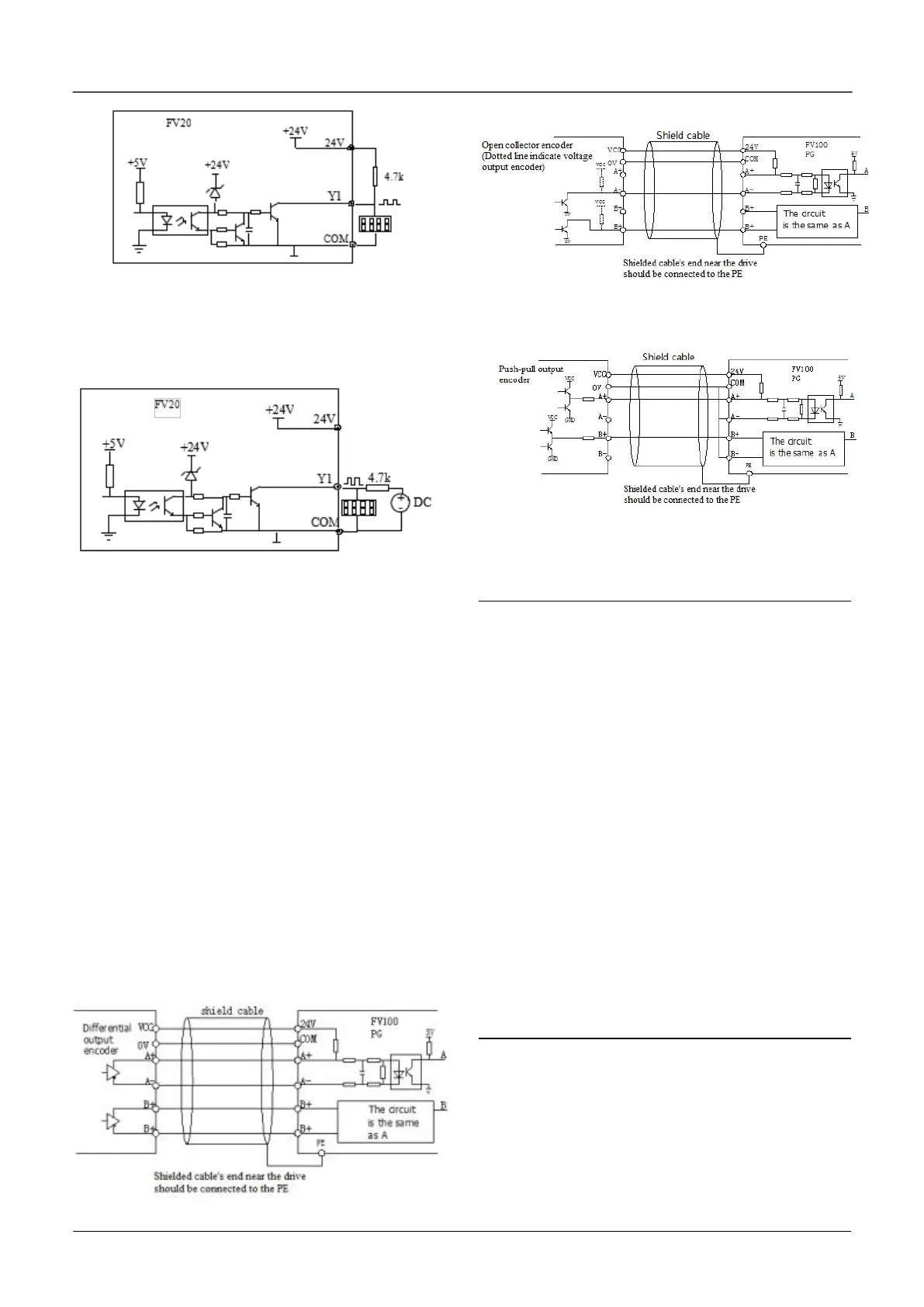
4. When Y1 is used as a digital pulse frequency
output, it can also use the external power supply.
The wiring is shown in Fig.4-16
Fig.4-16 Wiring method 2 of output terminal Y2
Wiring of relay output terminals R1a, R1b and R1c
If the drive drives an inductive load (such as
electromagnetic relays and contactor), then a surge
suppressing circuit should be added, such as RC
snubbing circuit (Notice that the leakage current
must be smaller than the holding current of the
controlled relay or contactor) and varistor or a
free-wheeling diode (Used in the DC
electric-magnetic circuit and pay attention to the
polarity when installing). Snubbing components
should be as close to the coils of relay or contactor
as possible.
5. Attentions for encoder (PG) wiring
Connection method of PG signal must be
corresponding with PG model. Differential output,
open collector output and push-pull output encoder
wirings are shown in Fig.4-17, 4-18 and 4-19.
Fig 4-17 Wiring of differential output encoder
Fig.4-18 Wiring of open collector output encoder
Fig.4-19 Wiring of push-pull output encoder
Note
1. Don’t short circuit terminals 24V and COM,
otherwise the control board may be damaged.
2. Please use multi-core shielded cable or
multi-stranded cable (above 1mm²) to connect the
control terminals.3. When using a shielded cable,
the shielded layer’s end that is nearer to the drive
should be connected to PE.
4. The control cables should be as far away(at least
20cm) from the main circuits and high voltage
cables as possible (including power supply cables,
motor cables, relay cables and contactor cables and
so on). The cables should be vertical to each other
to reduce the disturbance to minimum.
5. The resistors R in Fig. 4-13 and Fig.4-14 should
be removed for 24V input relays, and the resistance
of R should be selected according the parameters
of relay for non-24V relay.
6. Digital output terminal can not stand the voltage
higher than 30V
 Loading...
Loading...

