KINOVA
®
Gen3 Ultra lightweight robot User Guide 52
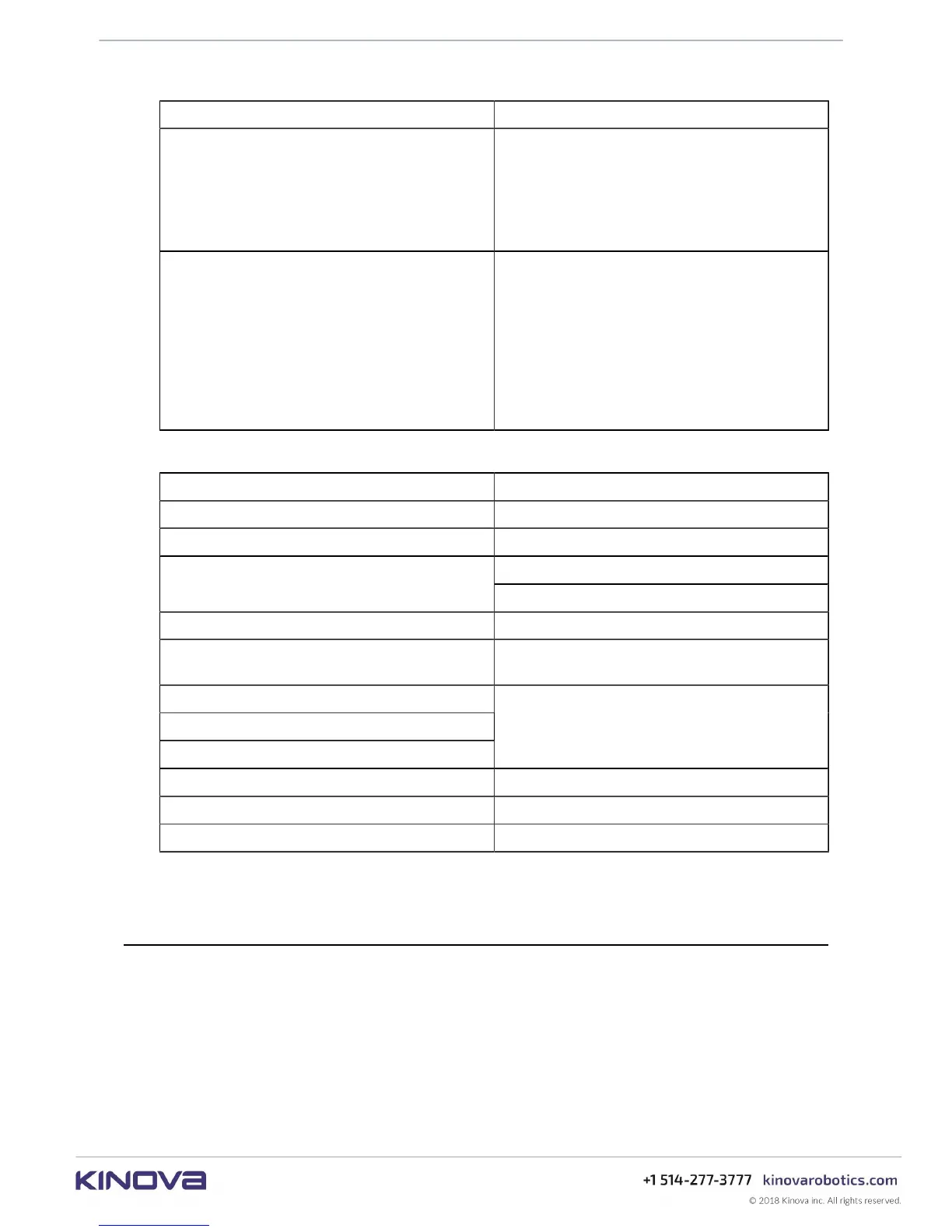
Table 17: Vision
Feature Detail
Depth sensor
480 x 270 @ 30, 15, 6 fps (16:9)
424 x 240 @ 30, 15, 6 fps (16:9)
FOV: 77° (diagonal)
focal length (range) - 18 cm to ∞
Color sensor
1920 x 1080 @ 30, 15 fps (16:9)
1280 x 720 @ 30, 15 fps (16:9)
640 x 480 @ 30, 15 fps (4:3)
320 x 240 @ 30, 15 fps (4:3)
FOV: 77° (diagonal)
focal length (range) - 30 cm to ∞
Table 18: Software / control
Feature Detail
Low-level control torque*, position, velocity, current
High-level control Cartesian position/velocity, joint position/velocity
protection zones - rectangular, spheric, cylindrical
High-level control features (mode dependent)
singularity handling
Servoing modes high-level, low-level
Data recorder*
logging of position, speed, temperature,
torque, battery, etc. (user-configurable)
Maximum velocity
Angular position of individual joints
Angular speed of individual joints
user-configurable
Supported ROS distribution Kinetic Kame
Boot time 45 s
Internal communication frequency 1 kHz
* to be implemented in future software release
Sensors
This section describes the robot sensors.
The robot contains a number of sensors to provide feedback on the status of the robot. This
data is used by the robot for internal monitoring and control.
The robot components contain the following sensors:
Base sensors
• voltage
• current
• temperature
** subject to future change