KINOVA
®
Gen3 Ultra lightweight robot User Guide 55
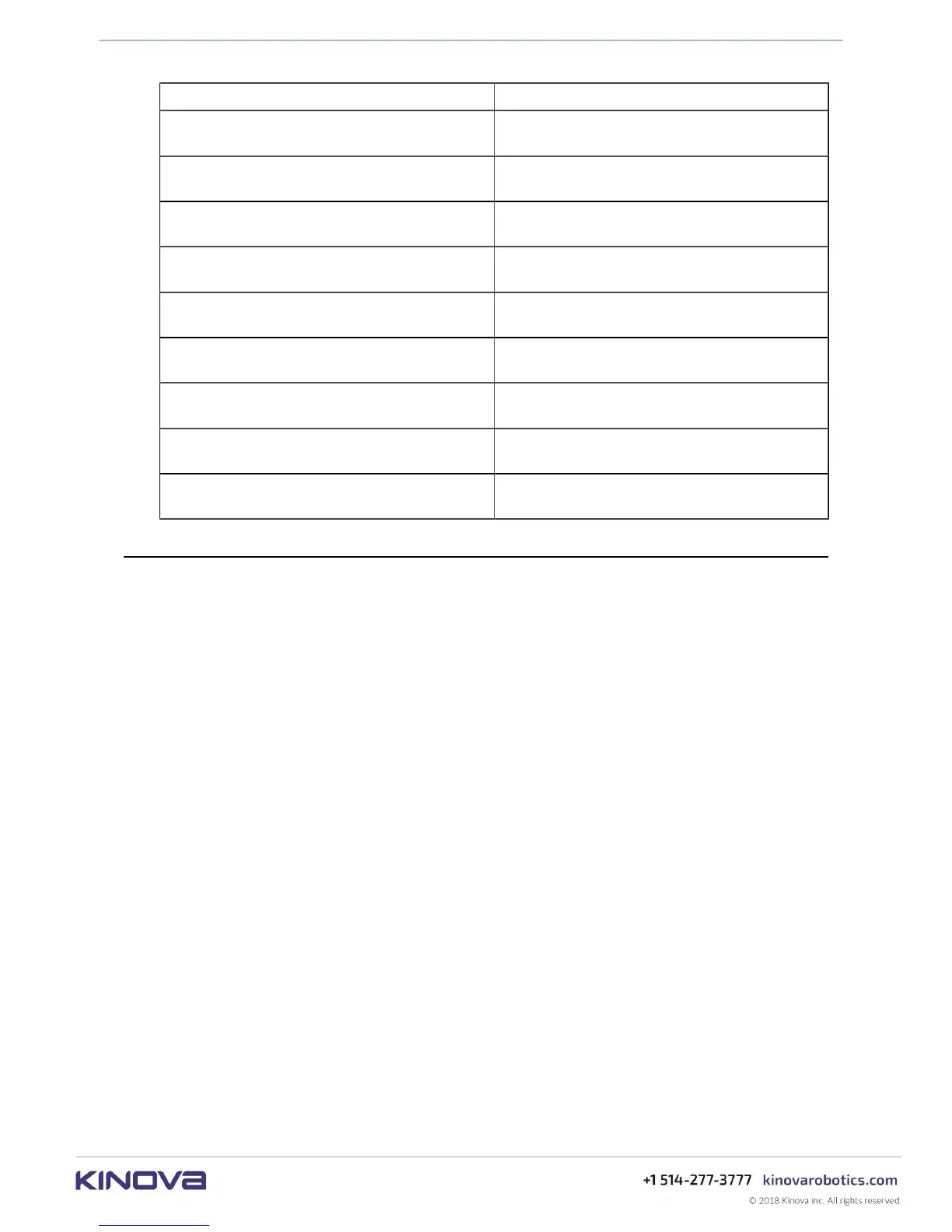
Field name Description
tool_pose_theta_x Measured Cartesian orientation
(X-axis) of the end effector in °
tool_pose_theta_y Measured Cartesian orientation
(Y-axis) of the end effector in °
tool_pose_theta_z Measured Cartesian orientation
(Z-axis) of the end effector in °
tool_twist_linear_x Measured cartesian linear velocity
(X-Axis) of the end effector in m / s
tool_twist_linear_y Measured cartesian linear velocity
(Y-Axis) of the end effector in m / s
tool_twist_linear_z Measured cartesian linear velocity
(Z-Axis) of the end effector in m / s
tool_twist_angular_x Measured cartesian angular velocity
(X-Axis) of the end effector in ° / s
tool_twist_angular_y Measured cartesian angular velocity
(Y-Axis) of the end effector in ° / s
tool_twist_angular_z Measured cartesian angular velocity
(Z-Axis) of the end effector in ° / s
Effective workspace
This section provides information on the effective workspace of the robot.
Effective workspace overview
The effective workspace refers to the region in three-dimensional space which is reachable by
the robot end effector. This is impacted by several factors, including the number and length of
the links, the joint ranges, and the shape of the links
There are two definitions of effective workspace, the first being larger than the second.
1. Nominal (or reachable) workspace - the set of all locations in the three-dimensional space
reachable by the end effector through at least one combination of end effector position and
orientation
2. Dextrous workspace - the subset of the nominal workspace in which the end effector still
has the full freedom to move, both in translation (three degrees of freedom) and in rotation
(three degrees of freedom)
Detailed information
The following graphic illustrates a two-dimensional cross-section of the nominal workspace for
the robot.