KINOVA
®
Gen3 Ultra lightweight robot User Guide 66
Robot communications and network interfaces
This section describes communications and network interfaces within the robot.
The devices in the robot, from the base of the arm through the chain of actuators, to the
interface module at the end of the arm, are daisy chained together using 41-pin flex cables
which carry power and communications.
The base, actuators, and interface module each contain an Ethernet switch. The Ethernet port
on the connector panel of the base controller allows an external computer to connect to the
Ethernet switch of the base.
The Kinova vision module and any 3rd party tool that makes use of Ethernet communications
user expansion pins in the interface connect directly to the interface module Ethernet switch.
Other tools (for example any gripper interfacing using the 10-pin spring loaded connector on
the interface) will interface instead with the interface module CPU (which is connected to the
Ethernet switch).
Together, this enables dual Ethernet networks between all the devices (base, actuators,
interface, Vision module, and end effector tools) with data carried between the base and
interface over the 41-pin flex cables. This is accessible from a client computer via the 1 Gbps
Ethernet port on the base controller connector panel.
The flex cables carry two distinct 100 Mbps Ethernet communications channels.
• one is for control and monitoring of actuators, interface module, and gripper (if present)
• the other is for data transmission for the vision module and expansion.
Each device connected to one of the Ethernet switches has an IP address to allow routing of
communications, transmitted using UDP.
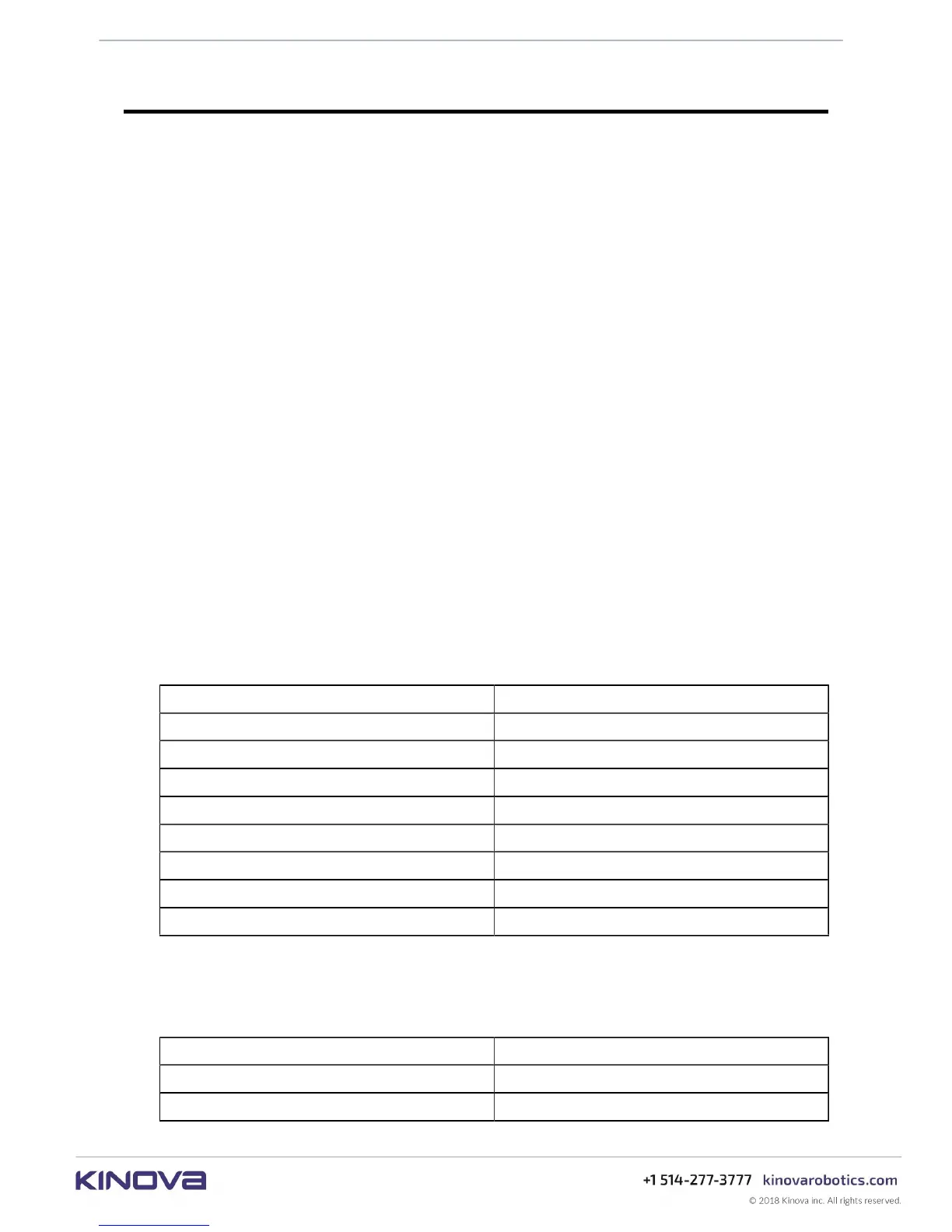
The actuators and interface module have the following default IP addresses:
Table 25: Actuator and gripper IP addresses
Device IP address
Actuator 1 10.10.0.10
Actuator 2 10.10.0.11
Actuator 3 10.10.0.12
Actuator 4 10.10.0.13
Actuator 5 10.10.0.14
Actuator 6 10.10.0.15
Actuator 7 10.10.0.16
Interface module 10.10.0.17
The expansion devices (Vision module and expansion tool peripherals) have the following IP
addresses:
Table 26: Expansion IP addresses
Expansion Devices IP address
Vision module 10.20.0.100
Expansion device 10.20.0.200/24*

 Loading...
Loading...