KINOVA
®
Gen3 Ultra lightweight robot User Guide 49
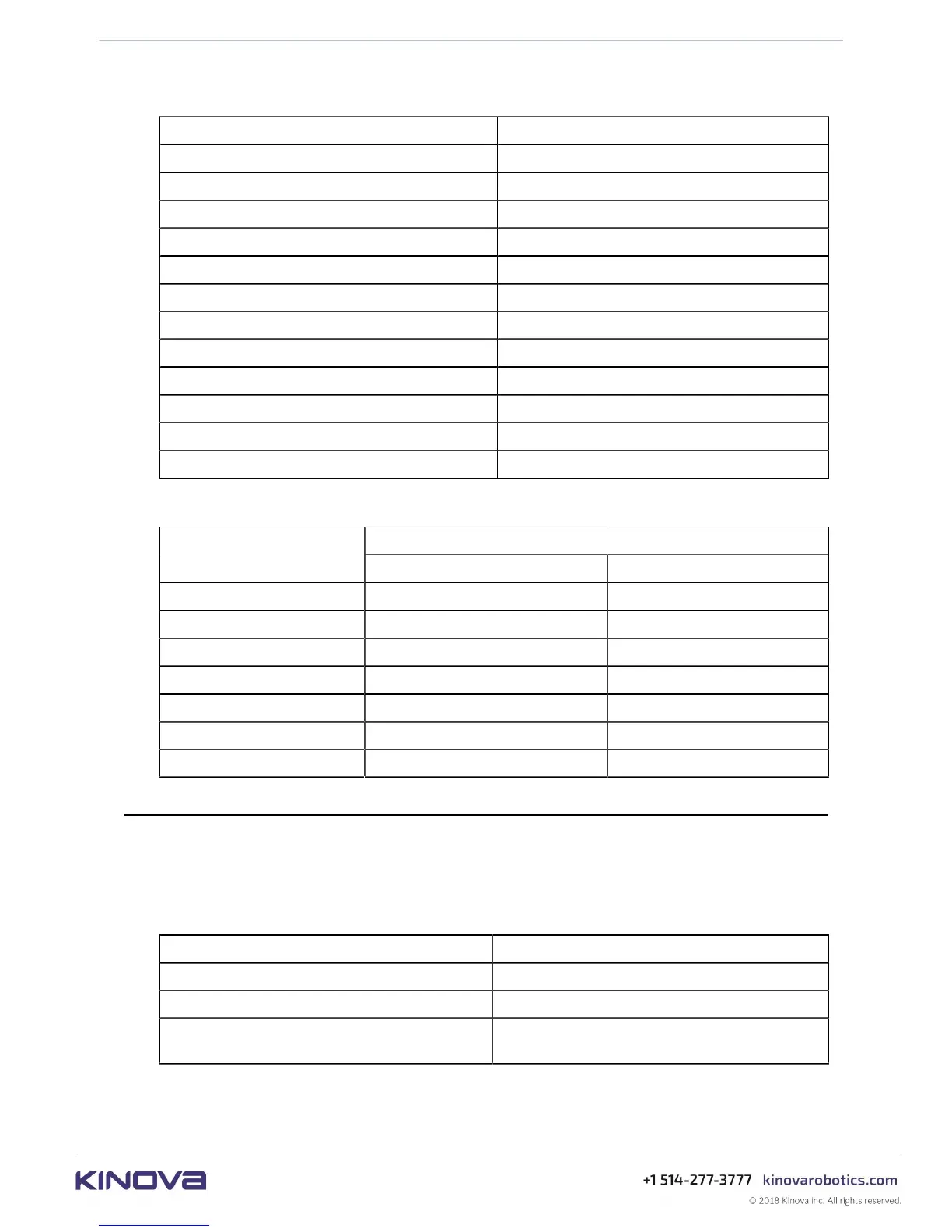
Table 9: 7 DoF spherical wrist robot geometric parameters
Description Length (mm)
Base to actuator 1 156.4
Base to shoulder 284.8
First half upper arm length 210.4
Second half upper arm length 210.4
Forearm length (elbow to wrist) 208.4
First wrist length 105.9
Second wrist length 105.9
Last actuator to end efector 61.5
Joint 1-2 offset 5.4
Joint 2-3 offset 6.4
Joint 3-4 offset 6.4
Joint 4-5 offset 6.4
Table 10: Joint limits - 7 DoF spherical wrist
Angular range
Actuator
Lower limit Upper limit
1 - ∞ + ∞
2 - 126° + 126°
3 - ∞ + ∞
4 - 147° + 147°
5 - ∞ + ∞
6 - 117° + 117°
7 - ∞ + ∞
Technical Specifications
This section provides the technical specifications for the KINOVA
®
Gen3 Ultra lightweight
robot, categorized for ease of reference. Some of these also appear within the main body
of the text.
Table 11: Safety / Security
Feature Detail
Safety alarm (power monitor)
≥ 10A (maximum current)
Position monitoring default and user-defined protection zones.
Thermal monitor
warning / shutdown above
maximum operating temperature