KINOVA
®
Gen3 Ultra lightweight robot User Guide 48
Dimensions, specifications, and capabilities
Schematic and dimensions - 7 DoF spherical wrist
This section provides a schematic diagram of the system and its physical dimensions.
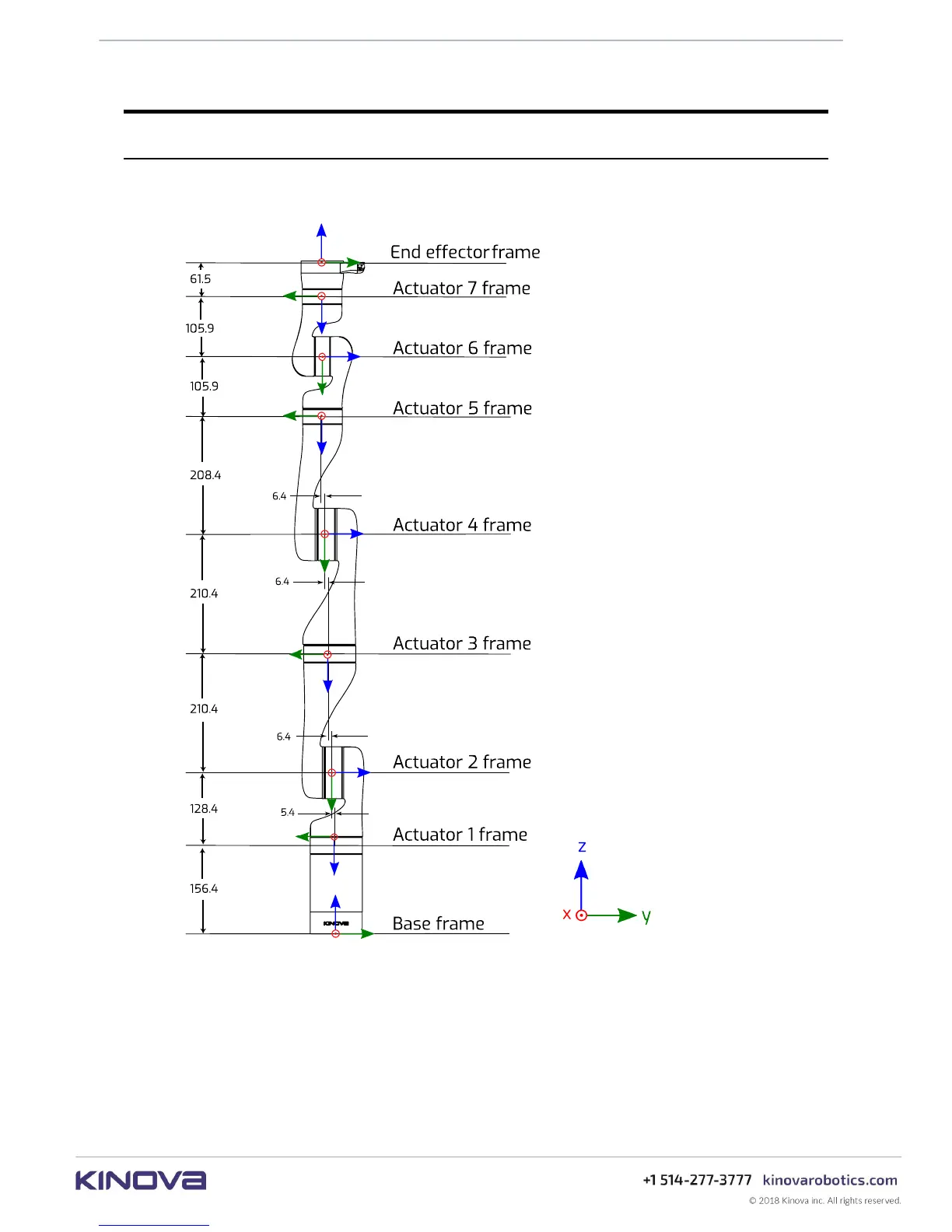
Figure 20: 7 DoF spherical wrist frames definition and dimensions
The image above defines reference frames for the base, joints (when all joint angles = 0) and end
effector. Each frame is defined in terms of the previous frame via a transformation matrix. The
diagram also indicates the link lengths and lateral offset values (measurements in mm).
The maximum reach of the robot, as defined by the distance from the shoulder (Actuator 2
frame) to the end effector frame, is 90.2 cm.