KINOVA
®
Gen3 Ultra lightweight robot User Guide 98
The value of each angle is displayed in degrees. The value displayed will be restricted to one full
rotation.
The maximum angular speed (or torque) for each actuator can be adjusted using the and
buttons. Each actuator can be adjusted between 0 and 100% of the hard maximums for the
joints.
There are two ways to control the angle of each actuator:
• type in a numerical value
• use the virtual joystick controls to apply a velocity or torque in the given direction. Pushing
the joystick up causes the angle to increase, while pushing it down causes it to decrease. The
further up or down the joystick is pushed, the higher the angular speed (or torque applied)
for the joint, up to the set limit. The angle will continue to change as long as the joystick is
being pushed.
Another joystick allows users to control the end effector finger position (if an end effector
is installed). The values for the finger state range between 0% (fully closed) and 100% (fully
open). Push the joystick to the right to increase the percentage (and open the fingers). Push the
joystick to the left to decrease the percentage (and close the fingers).
Virtual joystick keyboard shortcuts
This section describes keyboard shortcuts for the Web App virtual joysticks.
Introduction
The virtual joysticks for the Web App are controllable with mouse or touch inputs. Some
people (particularly those with a background in PC gaming) may find it more natural to control
using keyboard shortcuts. If you are accessing the Web App using a desktop device that has a
keyboard (such as a desktop or laptop PC) there are handy keyboard shortcuts available for the
joystick controls.
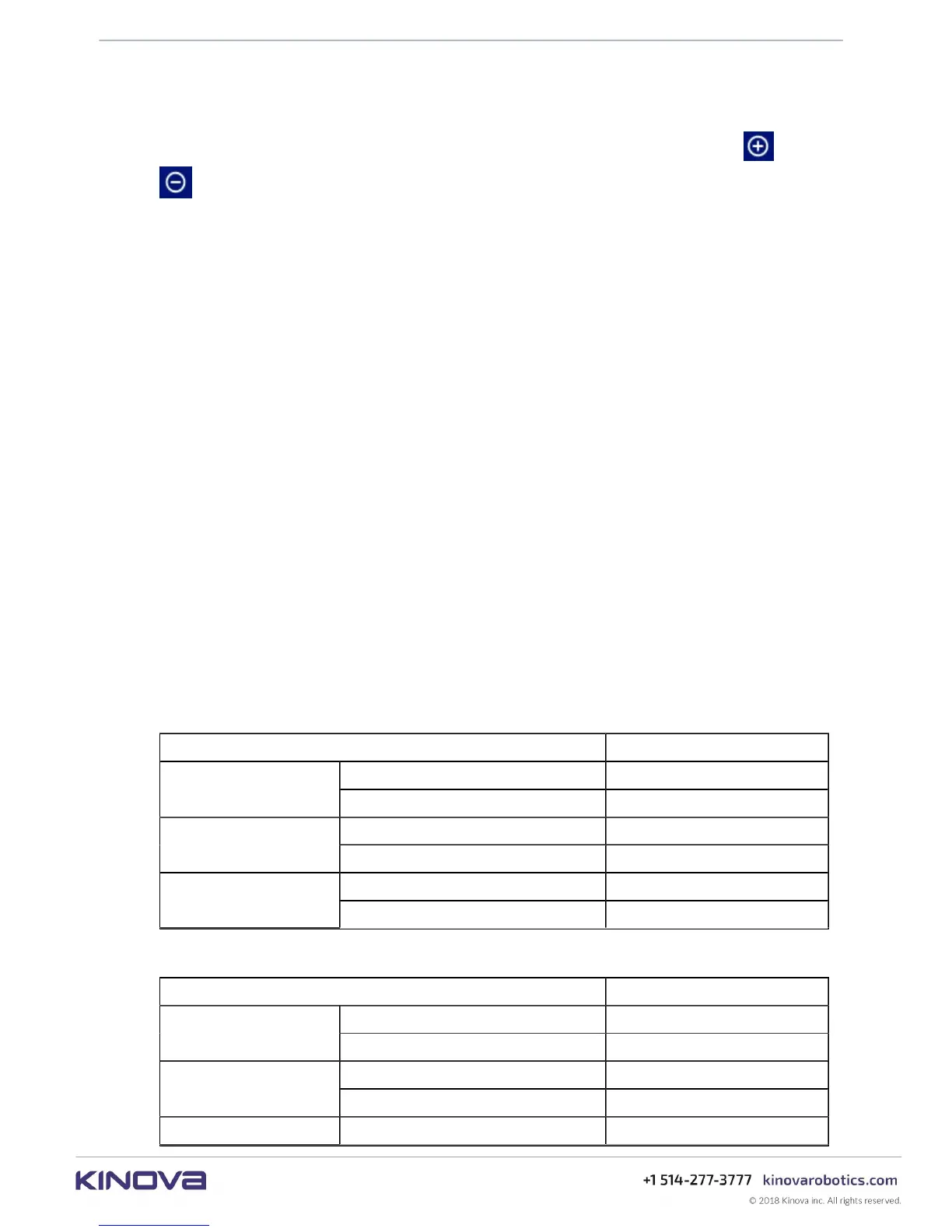
Cartesian joysticks keyboard shortcuts
Table 35: Pose translation joystick shortcuts
Control Shortcut
increase translation D
X
decrease translation A
increase translation W
Y
decrease translation S
increase translation R
Z
decrease translation F
Table 36: Pose orientation joystick shortcuts
Control Shortcut key
increase angle right arrow
X
decrease angle left arrow
increase angle up arrow
Y
decrease angle down arrow
Z increase angle right shift