KINOVA
®
Gen3 Ultra lightweight robot User Guide 81
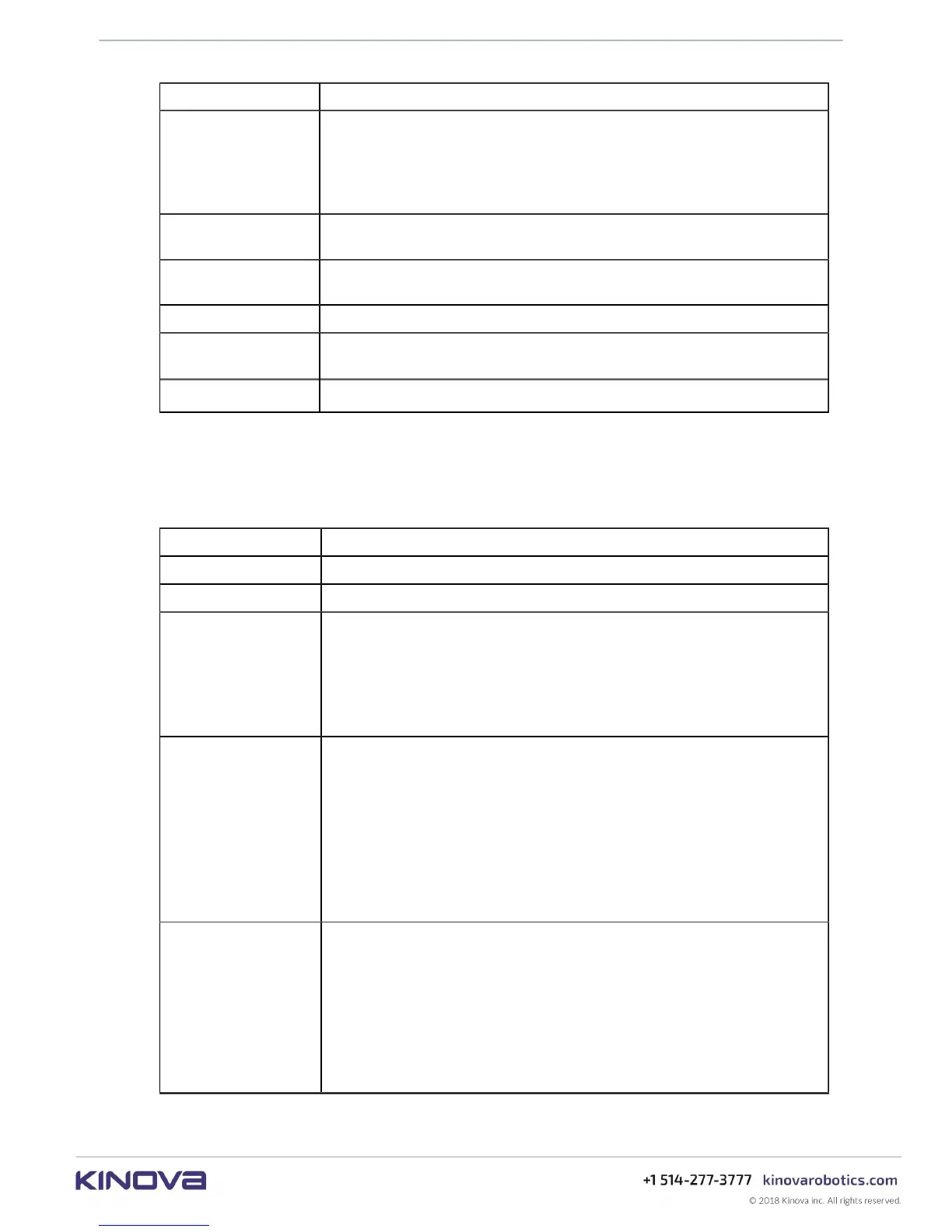
Configurable item Description
Wi-Fi
Set:
• SSID
• security key
• automatic connection allowed
Admittance
Set robot admittance mode (Cartesian, null-space, angular). This allows you to
move the robot by applying forces and torques by hand to the robot and joints.
Twist Wrench
Reference frame
Set reference frame to use with Twist and Wrench commands. Set to either
Tool or Mixed.
Operating mode Set operating mode (Run or Update)
Servoing mode
Set servoing mode (high-level, low-level)
Factory defaults
Delete all configuration and restores factory defaults
Actuators configuration
Table 29: Actuator configuration (Kinova.Api.ActuatorConfig)
Configurable item Description
Axis offsets Set actuator axis offset position
Torque offset Set actuator torque offset value
Control mode
Set actuator control mode. Options:
• position
• velocity
• current
• custom
Activated control loop
Define the contents included in activated control loop. Set bit mask, 1 to
include the data item, 0 to exclude:
• bit 0: joint position
• bit 1: motor position
• bit 2: joint velocity
• bit 3: motor velocity
• bit 4: joint torque
• bit 5: motor current
Control loop
parameters
Configure an individual control loop parameter (joint position, motor position,
joint velocity, motor velocity, joint torque, or motor current).
Configure:
• error saturation value
• output saturation value
• kAz
• kBz
 Loading...
Loading...
