Glossary
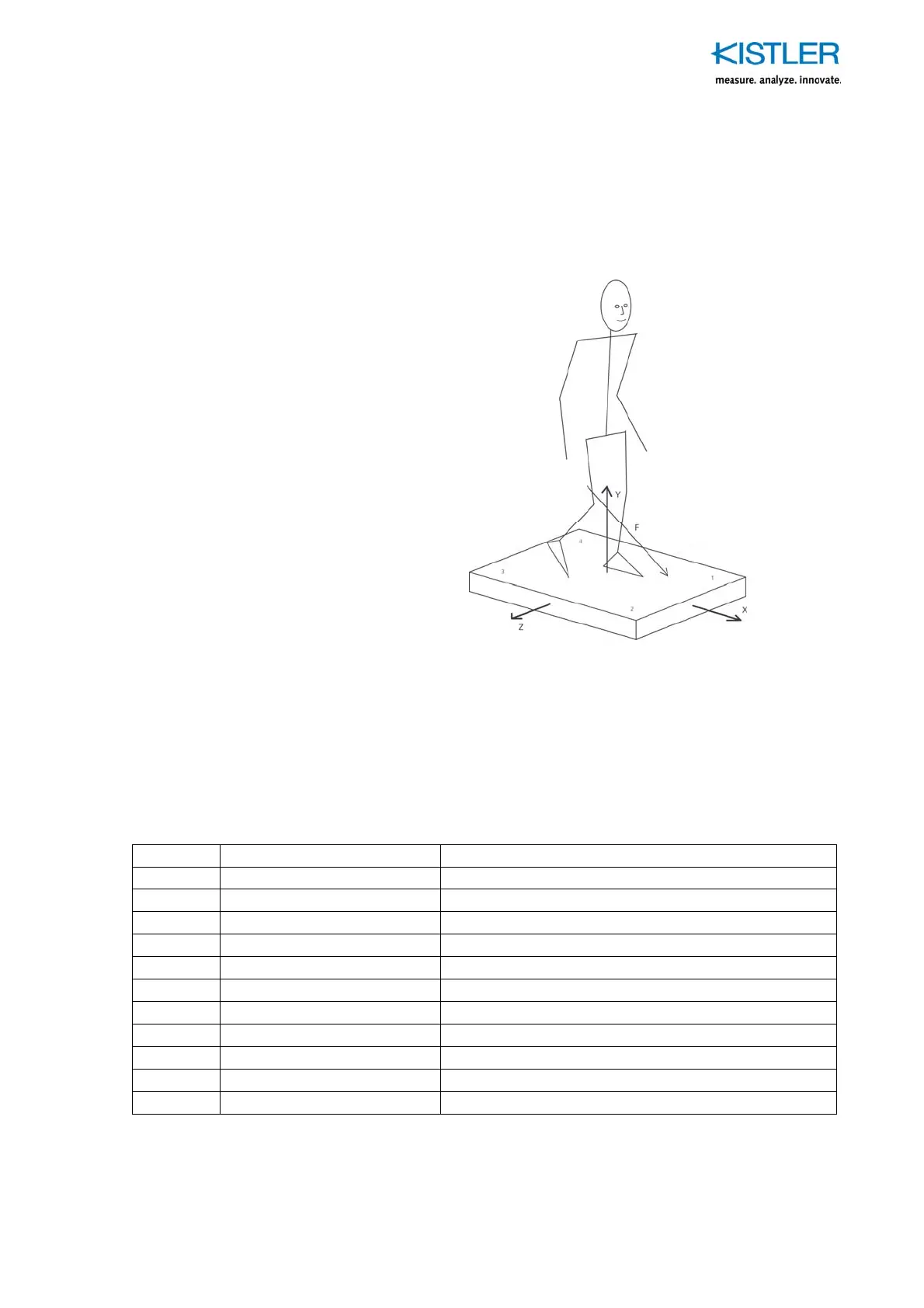
9.1.2 ISB Coordinate System
The ISB (International Society of Biomechanics) proposes
the following coordinate system:
Fig. 20: ISB coordinate system
In the ISB-system not the active (acting) but counteracting
(reacting) forces are described. The ISB coordinate system
is used above all in connection with comprehensive move-
ment analyses.
9.2 Parameters Calculation
Parameter Calculation Description
F
x
=F
x12
+F
x34
Medio-lateral force
1)
F
y
=F
y14
+F
y23
Anterior-posterior force
1)
F
z
=F
z1
+F
z2
+F
z3
+F
z4
Vertical force
M
x
=b·(F
z1
+F
z2
–F
z3
–F
z4
) Plate moment about x-axis
M
y
=a·(–F
z1
+F
z2
+F
z3
–F
z4
) Plate moment about y-axis
M
z
=b·(–F
x12
+F
x34
)+a·(F
y14
–F
y23
) Plate moment about z-axis
M
x
’ =M
x
+F
y
·a
z0
Plate moment about top plate surface
2)
M
y
’ =M
y
–F
x
·a
z0
Plate moment about top plate surface
2)
A
x
=(F
x
·a
z0
–M
y
)/F
z
x-coordinate of force application point (COP)
2)
A
y
=(F
y
·a
z0
+M
x
)/F
z
y-coordinate of force application point (COP)
2)
T
z
=M
z
–F
y
·a
x
+F
x
·a
y
Torque (free moment) about the vertical axis
1)
Walking direction is positive y-axis a, b and a
zo
– see technical data
2)
a
z0
is a negative value
9287C
_002-462e-03.11 Page 39