•
•
•
•
•
•
Maintenance
MiR200™ User Guide, Robot interface 2.0, 11/2018 v.1.2 28
7.1.2 Regular checks and replacements
Before starting replacement tasks that involve removal of the shield:
• Press the On/Off button to turn off the robot
• Push the battery switch button to remove power from the battery
• Remove the cover and unplug the ESD cable if applied, see Getting connected on
page 15
• Turn off relays and unplug the battery, see Powering up on page 12
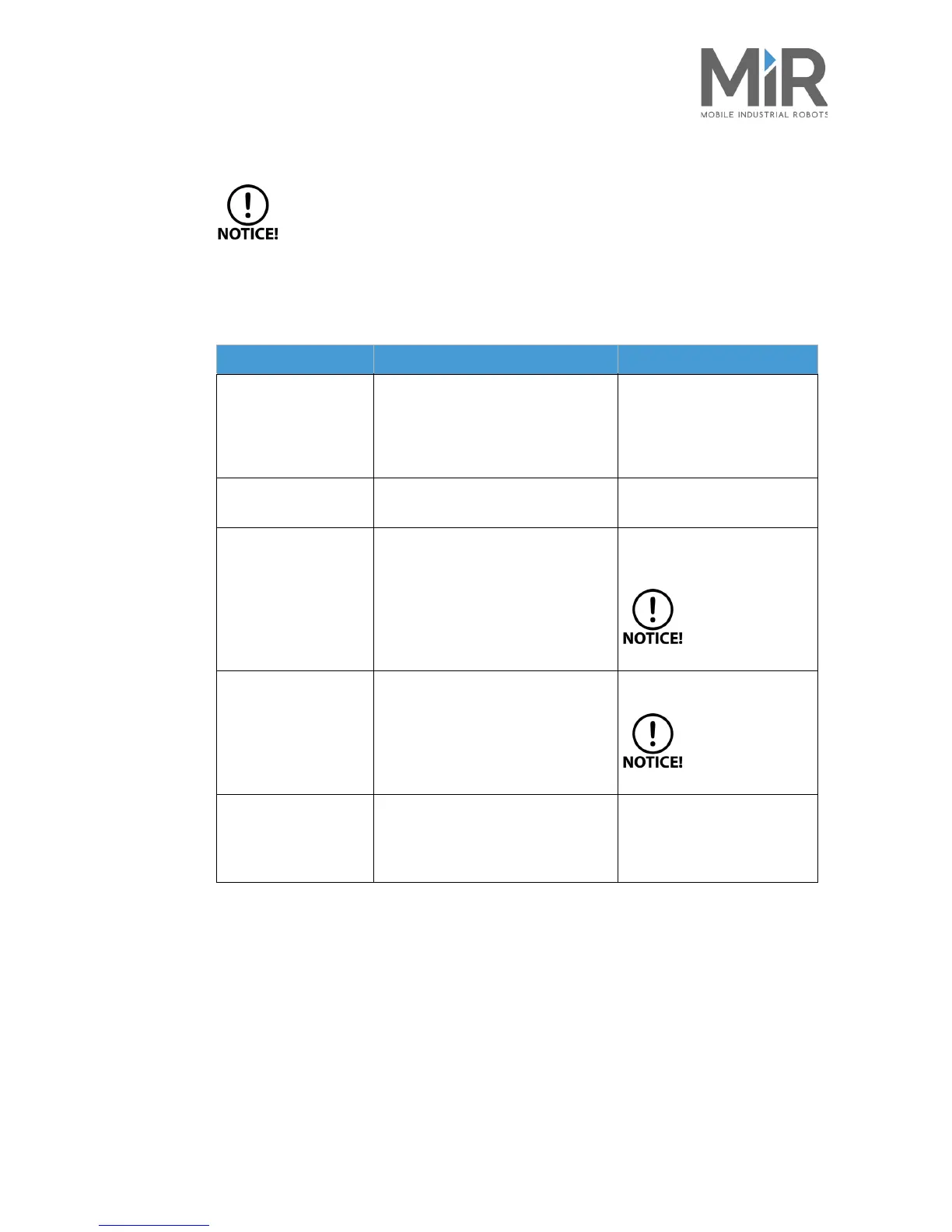
Part Maintenance Interval
Robot cover Check for cracks.
Check mounting. Does it sit evenly on
top of the robot with connections
accessible.
Check monthly and replace as
needed.
Caster wheels (the four
corner-wheels)
Check bearings and tighten. Check weekly and replace as
needed.
Drive wheels (the two
middle-wheels)
Check wheel surfaces for wear. Check every six months and
replace as needed.
The robot must be
calibrated after
replacement of the
wheels.
Scanners Check for visual defects, e.g. cracks and
scratches
Replace as needed.
The robot must be
calibrated after
replacement of the
scanners.
Emergency stop To check that the emergency stop works,
push down the red button and check
that the emergency reset button lights
up.
Every three to four month /
according to EN/ISO 13850
Safety of machinery - Emergency
stop function.