195
Examples of Applied Control Types Section 5-2
Note 1. Though cascade control can suppress the influence of disturbance on the
secondary loop, it cannot suppress the influence of disturbance on the pri-
mary loop. Whereas, feedforward control can suppress the influence of
disturbance on the primary loop in cascade control.
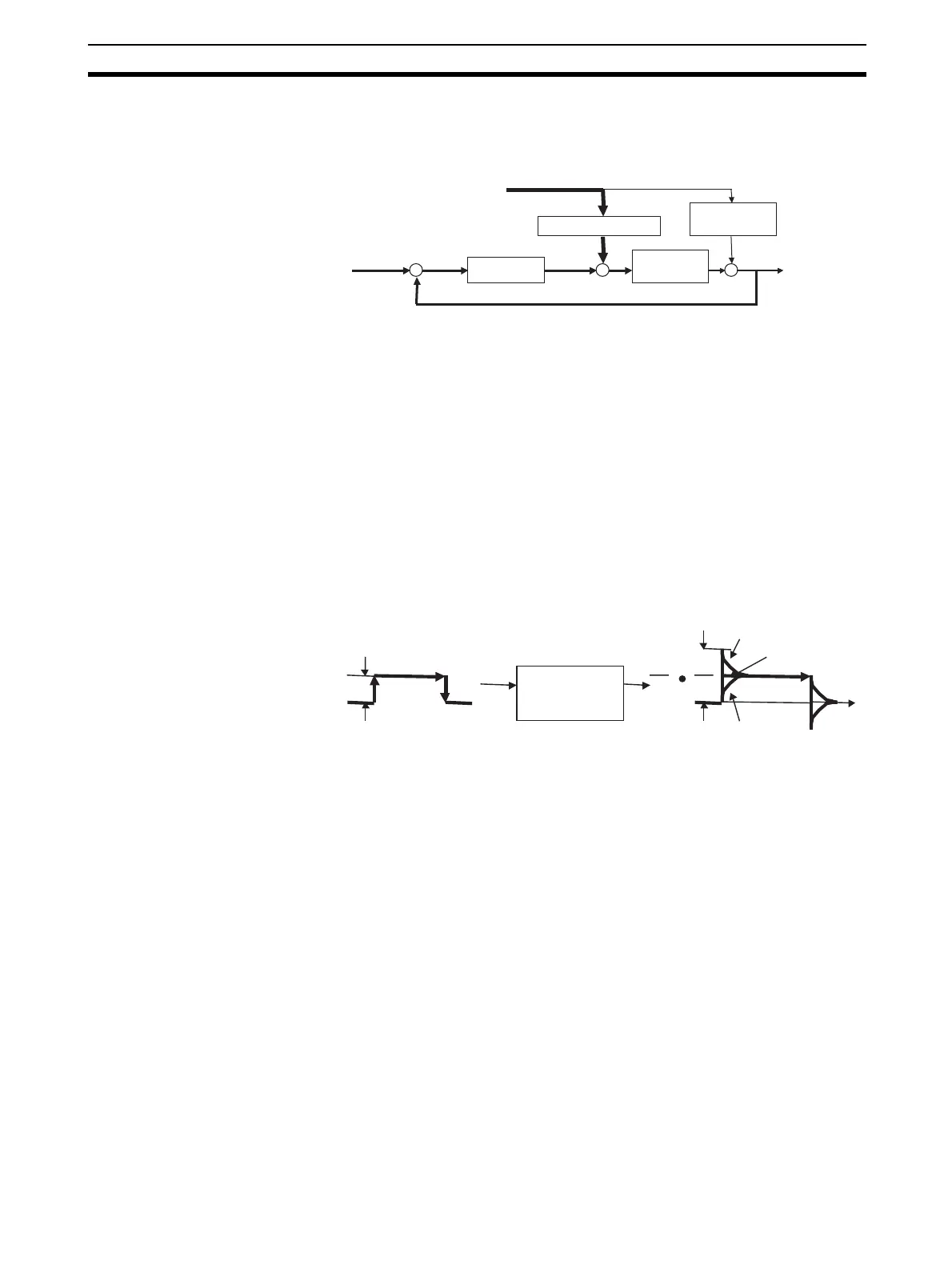
2. A general feedforward control model is obtained by dividing the distur-
bance characteristics by the process characteristics. The transfer function
of feedforward control is as follows when the disturbance characteristic is
K2/(T+T2•s) as its transfer function is approximated by the first-order lag,
and the process characteristic is K1/(1+T1•s) as its transfer function is ap-
proximated by the first-order lag:
K2/K1 x (1+T1•s) / (1+T2•s)
where,
T1: Time constant of process
T2: Time constant of disturbance
K1: Process gain
K2: Disturbance gain
The step response in this model is as follows:
As shown above, when T1 (time constant of process) is longer than T2 (time
constant of disturbance) (T1>T2), a lead is applied to the feedforward control
signals (lead compensation). Alternatively, when T1<T2, a delay is applied to
the feedforward control signals (delay compensation).
To minimize the influence of disturbance in feedforward control, the values of
T1 (time constant of process) and T2 (time constant of disturbance) must be
set to the appropriate values.
Set T1 (time constant of process = time constant of lead), T2 (time constant of
disturbance = time constant of delay) and K (disturbance gain and process
gain) in the Lead/Delay block (Block Model 147).
PID control
Feedforward control
Process
characteristics
Set Point
SP
+
−
PV
+
+
Disturbance
Disturbance
characteristics
Control
output
−
+
Feedforward
control
T1 > T2
T1=T2
T1 < T2
K2 T1
K1 T2
1