12
6K Hardware Installation Guide
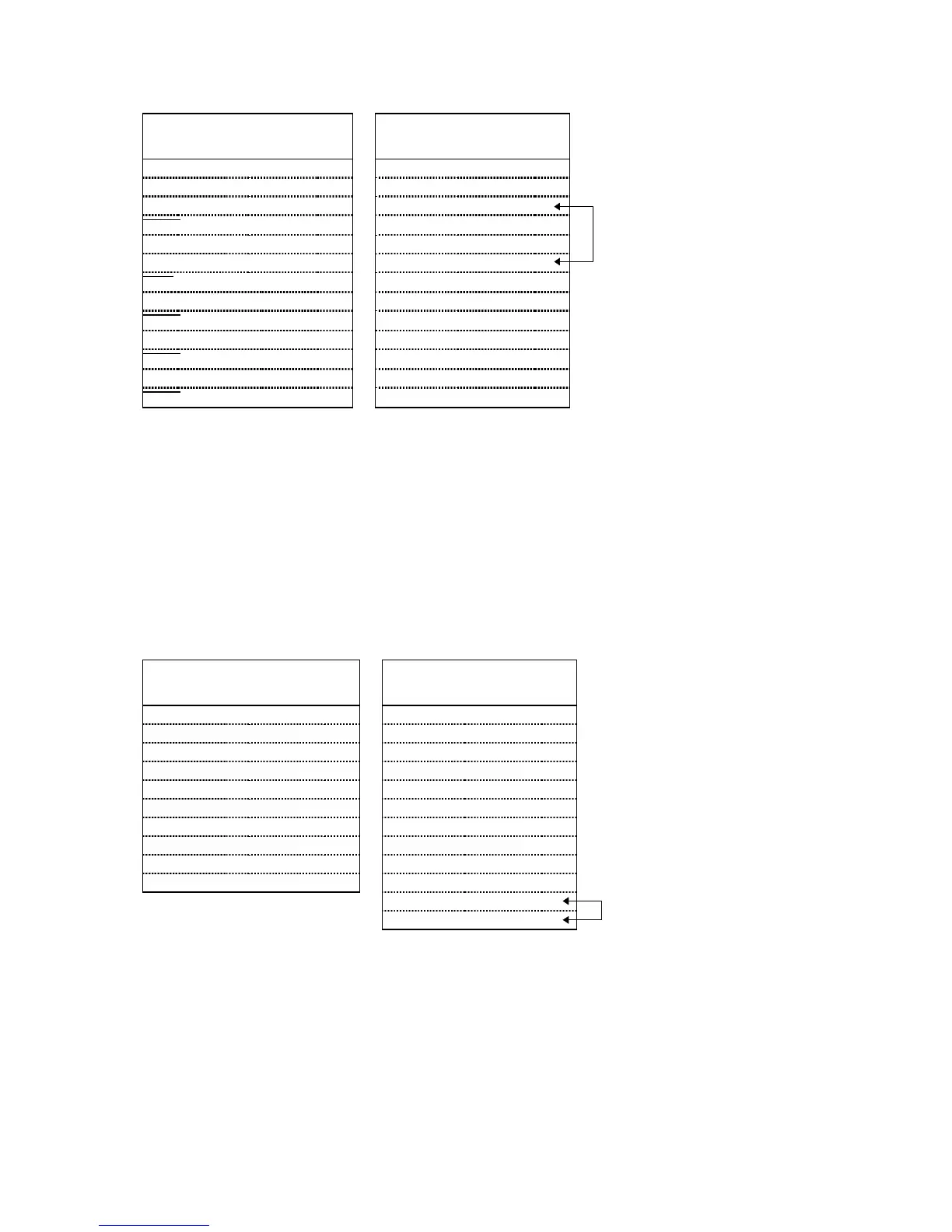
CONNECTIONS TO THE BD-E DRIVE
BD-E Drive Connections 6K Connections
Signal Name Connector Pin Signal Name Connector Pin
V2 User I/O 01
↔
CMD – DRIVE 06
V1 User I/O 02
↔
CMD + DRIVE 03
GND User I/O 04
↔
GND ENCODER 09
RST
User I/O 05
↔
COM DRIVE 14
+15V User I/O 06
↔
SHTNO DRIVE 07
SHTNC DRIVE 08
FT
User I/O 09
↔
DFT DRIVE 05
AOP User I/O 10
↔
A + ENCODER 02
AOP
User I/O 11
↔
A – ENCODER 03
BOP User I/O 12
↔
B + ENCODER 04
BOP
User I/O 13
↔
B – ENCODER 05
ZOP User I/O 14
↔
Z + ENCODER 06
ZOP
User I/O 15
↔
Z – ENCODER 07
NOTE
: These connections will work only of the BD-E’s jumper LK2 is set to
position B (this is not the factory default setting).
CONNECTIONS TO THE DYNASERV DRIVE
Dynaserv Drive Connections 6K Connections
Signal Name Connector Pin Signal Name Connector Pin
A + DN1 13
↔
A + ENCODER 02
V1 DN1 14
↔
A – ENCODER 03
SRVON DN1 23
↔
SHTNO DRIVE 07
Vcc DN1 24
↔
+5V ENCODER 01
B + DN1 29
↔
B + ENCODER 04
B – DN1 30
↔
B – ENCODER 05
Z + DN1 43
↔
Z + ENCODER 06
Z – DN1 44
↔
Z – ENCODER 07
VIN DN1 49
↔
CMD + DRIVE 03
AGND DN1 50
↔
AGND DRIVE 15
COM DRIVE 14
GND ENCODER 09
NOTE
: The Dynaserv’s default setting is for Position Mode (for accepting step
and direction command signals). The connections above assume the
Dynaserv is reconfigured for Velocity Mode or Torque Mode. Refer to
the Dynaserv user guide for additional information.
Jumper SHTNC to ground (GND).
Jumper COM to
round (GND).
 Loading...
Loading...










