Importinguserdata
Y
oucanimportuserdata(i.e.:GPXformatWaypoints,RoutesandTracks)
toyourdisplay.
1.InserttheMicroSDcardthatcontainsyouruserdatafilesintothememory
cardreaderonyourdisplay.
2.Select[Importfromcard]fromtheImport/exportmenu:([Homescreen>
Settings>Import/export>Importfromcard]).
3.NavigatetoyourUserdatafile(.gpx).
4.SelecttherelevantGPXfile.
Y ouruserdatahasnowbeenimported.
5.Select[OK].
4.7EV-1headingsensor
Y oucanconnectanEV-1headingsensortoyourdisplay,thiswillensurethat
accurateheadingdataisavailable,regardlessofvesselmovement.
TheEV-1headingsensorwillautomaticallycalibrate(linearize)itselfwhilethe
followingconditionsaremet:
•vesselspeedisbetween3to15knots,and
•atleasta270°turnhasbeenmade.
Note:
Thetimeittak esforautomaticcalibrationcanbereducedbycompletinga
full360°turnatbetween3to15knots.
A ftertheinitialcalibrationhasbeencompletedanotificationwillbedisplayed
andaMaxdeviationvaluewillbereportedinthe[EVOCOMPASS]section
ofthe[Thisdisplay]menu.Ifdashesaredisplayedthenthecalibrationhas
notbeensuccessful.
IftheMaximumdeviationis45°orgreater,itisrecommendedthateitherthe
EV-1isrelocated,inalocationwithlessmagneticinterference,orthatany
devicescausingmagneticinterferencearemovedfartherawayfromtheEV-1.
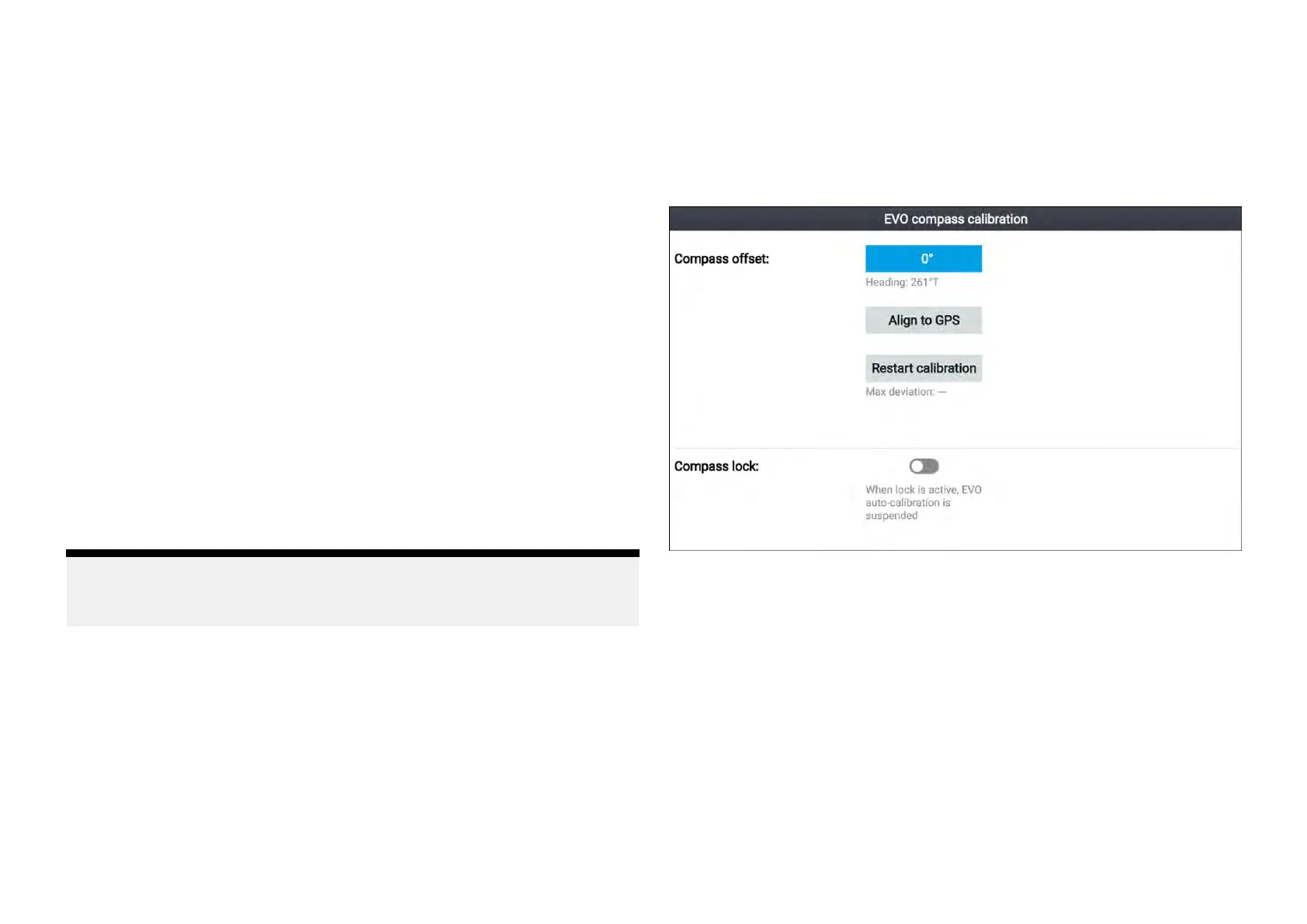
ManuallyadjustinganEV-1headingsensor
IfthereisadifferencebetweenHeadingandthereportedCOG(CourseOver
Ground),whichisnotattributabletotideandwindconditions,thenyoucan
adjusttheEV-1headingsensor’ssettingstocompensate.
TheEV-1settingscanbeaccessedfromthe[Thisdisplay]menu:
[Homescreen>Settings>Thisdisplay>EVOset-up].
1.Ifthedifferenceiswithinplusorminus10°,thenselectthe[Compass
offset]fieldandadjustuntilCOGandheadingvaluesarethesame,or
2.Ifthedifferenceisgreaterthanplusorminus10°youcanalignyour
headingsensortotheCOG,reportedbyyouGPS/GNSS,byselecting
[AligntoGPS]andfollowingtheonscreeninstructions.
Restartingcalibration
Ifyouexperienceproblemswithyourheadingdataorhavehadtorelocate
theEV-1sensorthenyoucanrestarttheautomaticcalibration.
Fromthethisdisplaymenu:
1.Select[EVOset-up].
32