13-14 Application Instructions Synchronous Motors MKD
19.05.2004 Version7.0 DOK-MOTOR*-MKD*******-PR07-EN-P
13.7 Motor Encoder
To control the motor speed and/or to position the motor, the drive
controller requires information on the current motor position.
To achieve this, the integrated encoder system (motor feedback) makes
the appropriate signals available to the drive controller. The drive
controllers are capable of transmitting the positional value thus
determined to a superordinate CNC or SPS.
The encoder electronics is equipped with a data memory where the
motor type name, the control loop parameters and the motor parameters
are filed.
These data are read by the digital intelligent drive controllers by Rexroth.
This ensures
• quick and easy startup,
• adjustment between the motor and the drive controller without the risk
of damage to the motor.
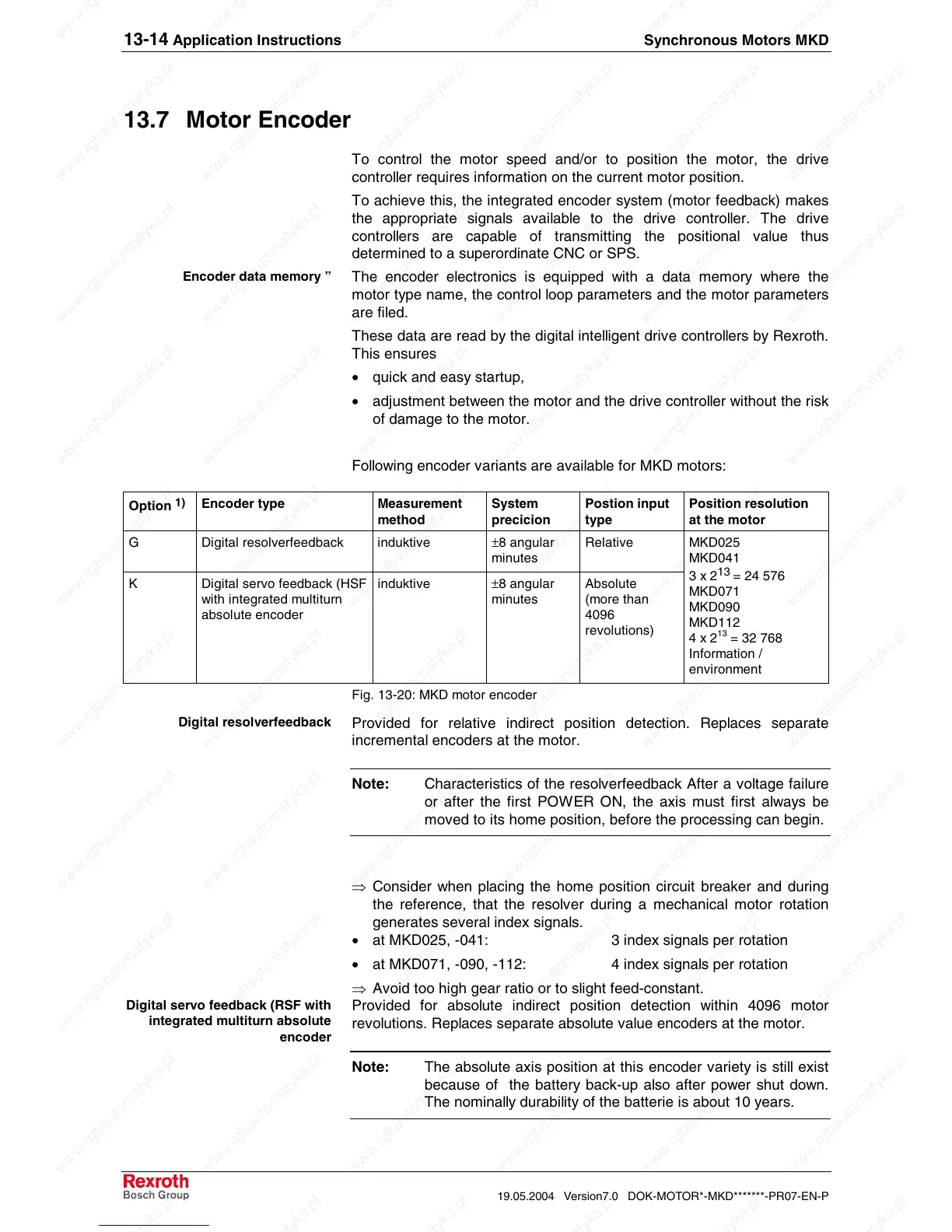
Following encoder variants are available for MKD motors:
Option
1)
Encoder type Measurement
method
System
precicion
Postion input
type
Position resolution
at the motor
G Digital resolverfeedback induktive
±8 angular
minutes
Relative
K Digital servo feedback (HSF
with integrated multiturn
absolute encoder
induktive
±8 angular
minutes
Absolute
(more than
4096
revolutions)
MKD025
MKD041
3 x 2
13
= 24 576
MKD071
MKD090
MKD112
4 x 2
13
= 32 768
Information /
environment
Fig. 13-20: MKD motor encoder
Provided for relative indirect position detection. Replaces separate
incremental encoders at the motor.
Note: Characteristics of the resolverfeedback After a voltage failure
or after the first POWER ON, the axis must first always be
moved to its home position, before the processing can begin.
⇒ Consider when placing the home position circuit breaker and during
the reference, that the resolver during a mechanical motor rotation
generates several index signals.
• at MKD025, -041: 3 index signals per rotation
• at MKD071, -090, -112: 4 index signals per rotation
⇒ Avoid too high gear ratio or to slight feed-constant.
Provided for absolute indirect position detection within 4096 motor
revolutions. Replaces separate absolute value encoders at the motor.
Note: The absolute axis position at this encoder variety is still exist
because of the battery back-up also after power shut down.
The nominally durability of the batterie is about 10 years.
Encoder data memory ”
Digital resolverfeedback
Digital servo feedback (RSF with
integrated multiturn absolute
encoder
 Loading...
Loading...


