2F-85 & 2F-140 - Instruction Manual
3.3.Environmental and Operating Conditions
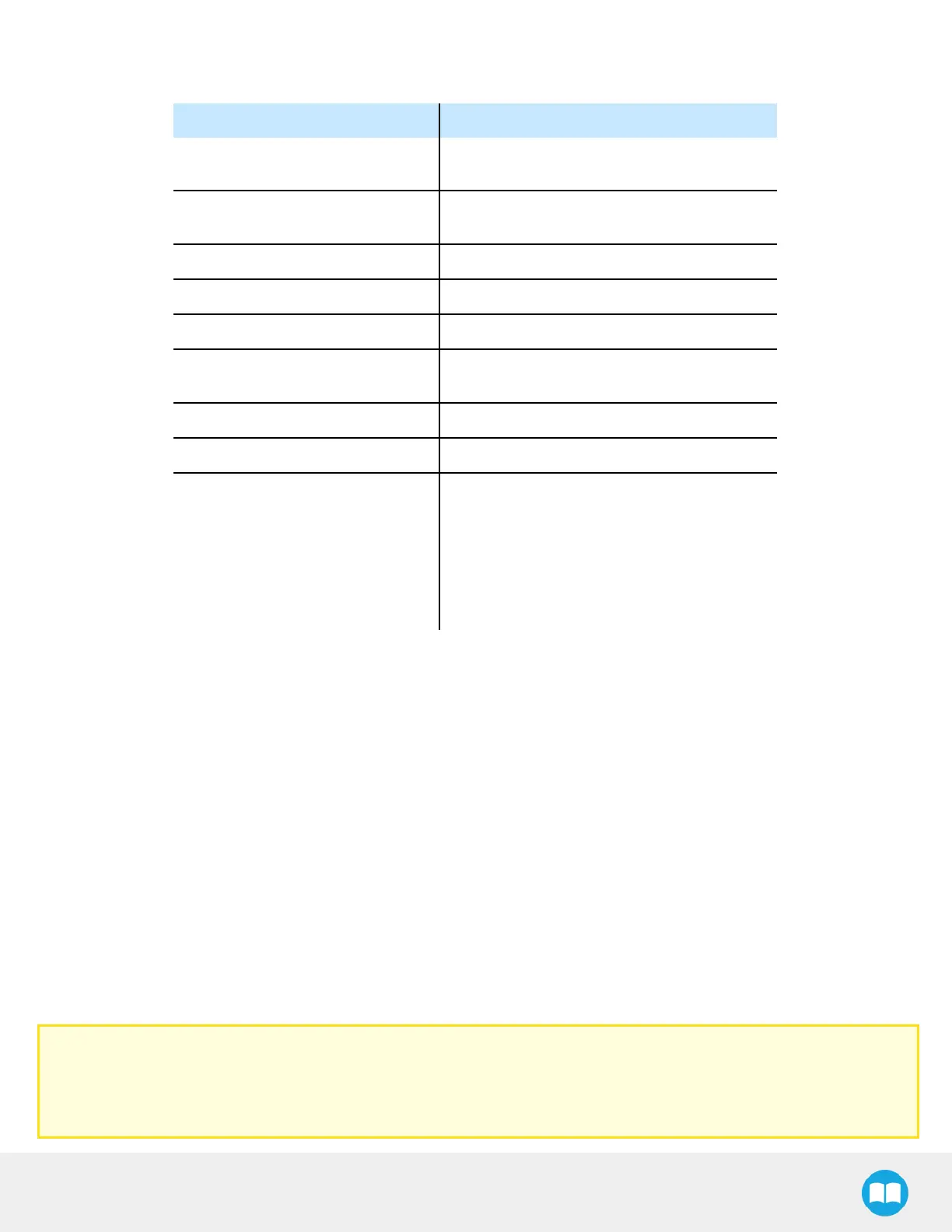
CONDITION VALUE
Minimum storage/transit
temperature
-30°C [-22°F]
Maximum storage/transit
temperature
70°C [158°F]
Minimum operating temperature -10°C [14°F]
Maximum operating temperature 50°C [122°F]
Humidity (non-condensing) 20-80%RH
Maximum vibration
(storage/transit)
5G
Maximum vibration (operating) 2G
IPRating IP40
Other
l
Free from dust, soot or fluids
l
Free from corrosive liquidsor gases
l
Free from explosive liquids or gases
l
Free from powerful electromagnetic inter-
ference
Table 3-2: Environmental and operating conditionsof the 2-Finger Adaptive Gripper
3.4.Mechanical Installation
3.4.1.Installing the Gripper on the robot
Single Gripper Installation
Instructions
You must use a coupling to attach the gripper on the robot. Here are the steps to follow to mount the gripper on the robot
(exploded views in the figure below).
1. Secure the gripper coupling on the robot wrist, and use the coupling dowel pin to align parts.
2. Secure the gripper to the coupling
3. Install the wrist connection protector (for e-Series only)
Caution
When no tooth lock washer ispresent, lock screwsin place using medium strength threadlocker. Tooth lock washers
provide grounding for the casing of the gripper through the mounting screws. For more information, refer to the
Electrostatic Discharge Safety section.
21