2F-85 & 2F-140 - Instruction Manual
1.3.Object picking
The 2-Finger Gripper has a single actuator for opening and closing the fingers. The fingersautomatically adapt to the shape of the
object manipulated.
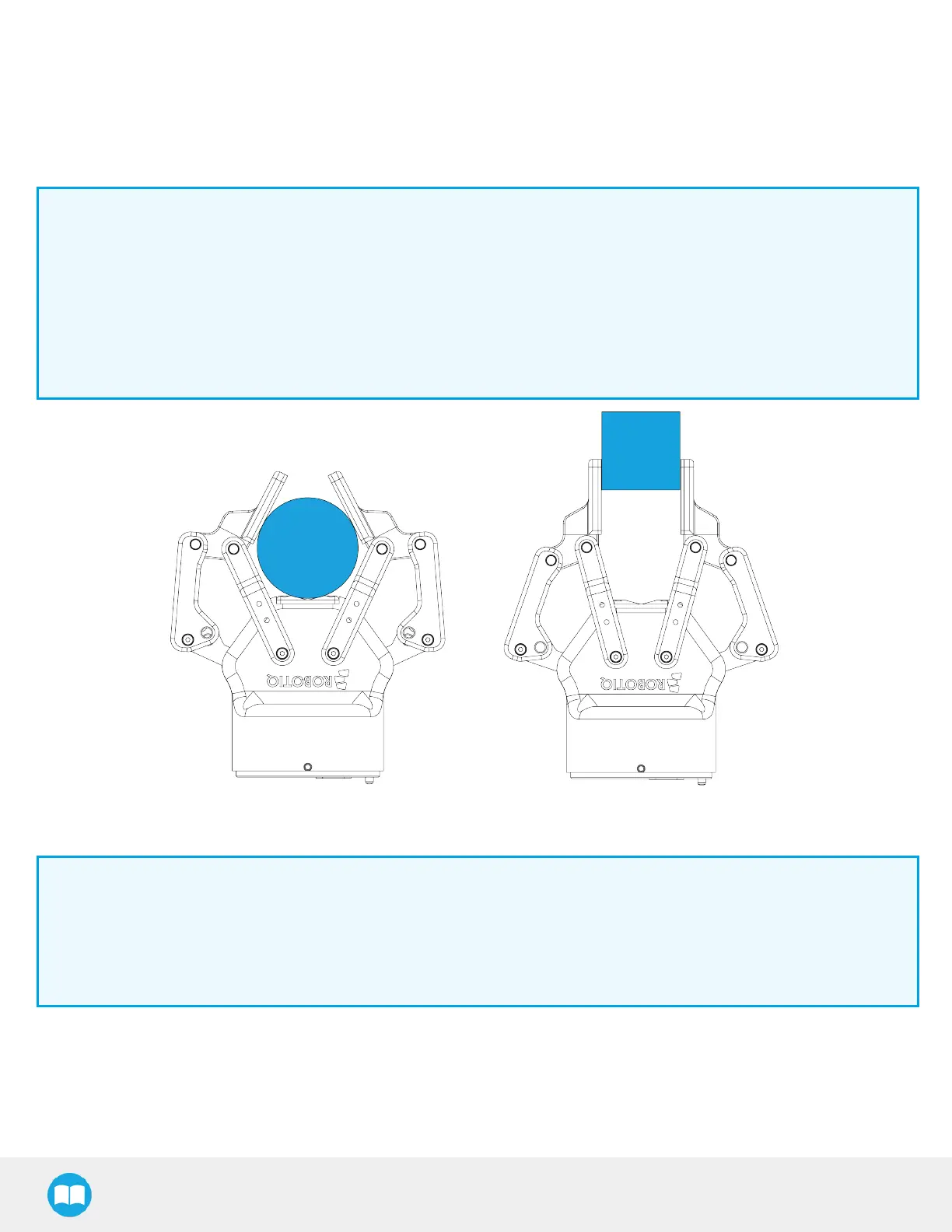
Fingers will adopt either a parallel grasp or encompassing grasp asshown in the figure below.
Info
Closing or opening isdone via the "Go to requested position" command sent to the gripper. Whether the fingersclose
to produce anencompassing or parallel grasp isdetermined mechanicallyby:
l
The objects'sgeometry;
l
The relative position of the object with respect to the gripper.
In other words, picking the same object could result in either an encompassing or fingertip grasp based on an object's
position and geometry.
Fig. 1-3: 2-Finger parallel and encompassing grips.
Info
It is important to note that a fingertip grasp can only be performed when the fingers touch the object with the upper
section of the distal phalanxesfirst. Inversely, for an encompassing grip, the fingers must touch the object with the
proximal or the lower section of the distal phalanxesfirst. Also, to ensure stability, the object should be held against the
gripper palm while performing an encompassing grip. Refer to Fig. 1-5 for a visual representation of the parallel and
encompassing grasp regions on the distal phalanx of the 2-Finger Gripper.
11