2F-85 & 2F-140 - Instruction Manual
1.1.Gripper nomenclature
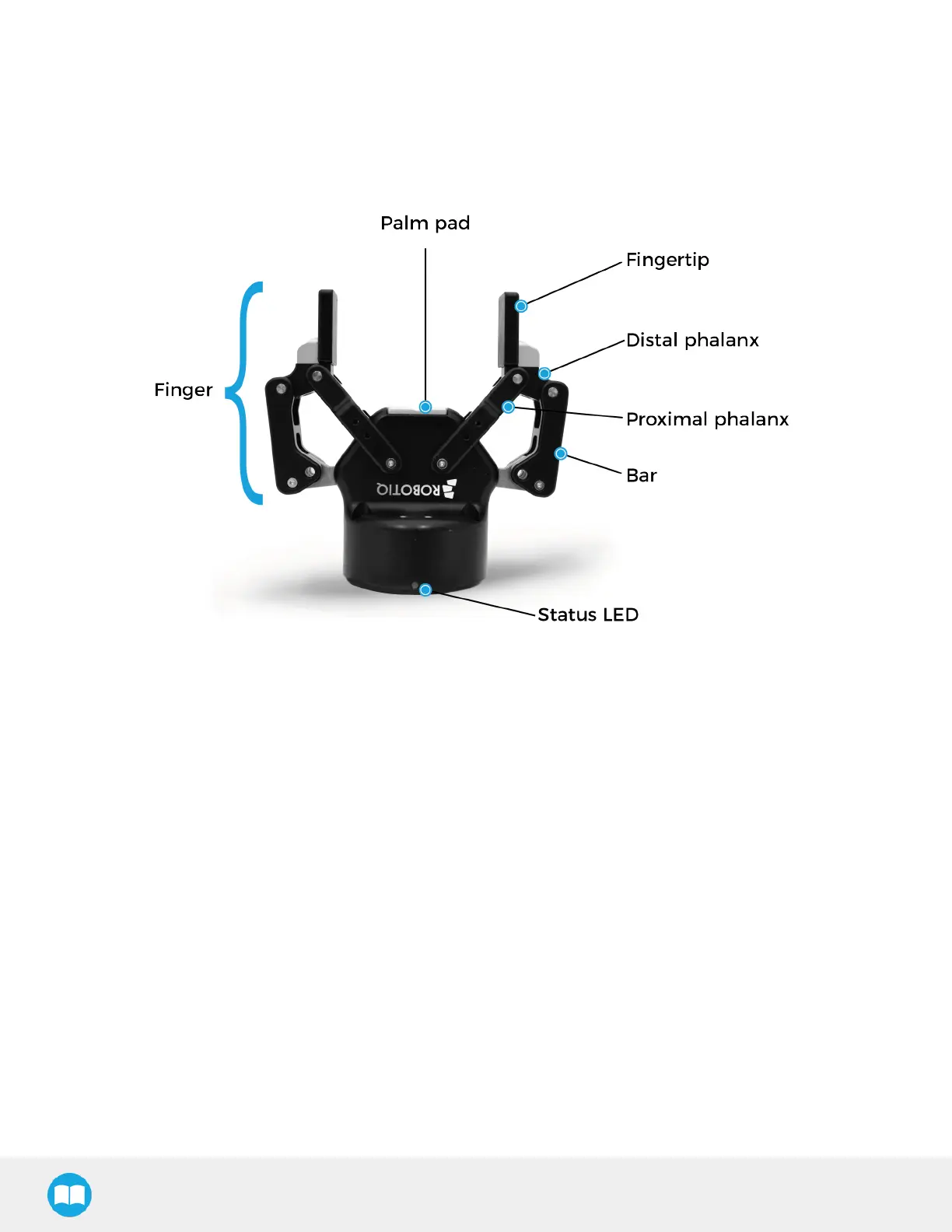
The 2-Finger Gripper has two articulated fingers that each have two joints (two phalanxesper finger), as shown in the figure below.
The grasp-type gripper can engage up to five points of contact with an object (two on each of the phalanges plusthe palm). The
fingersare under-actuated, meaning they have fewer motors than the total number of joints. Thisconfiguration allowsthe fingers
to automatically adapt to the shape of the object they grasp which simplifies the control of the gripper.
Fig. 1-1: Robotiq 2-Finger Adaptive Gripper.
Please refer to the Spare Parts, Kitsand Accessoriessection for details on standard and optional parts.
The statusLED presented in the figure above will be :
l
solid blue/red when booting
l
solid blue when powered with no errors (while communication is active)
l
solid red if minor fault occurs, see status details in the Control section.
l
blinking red/blue if major fault occurs, see statusdetails in the Control section.
9