2F-85 & 2F-140 - Instruction Manual
Step 3:Move the robot to the pick-up location
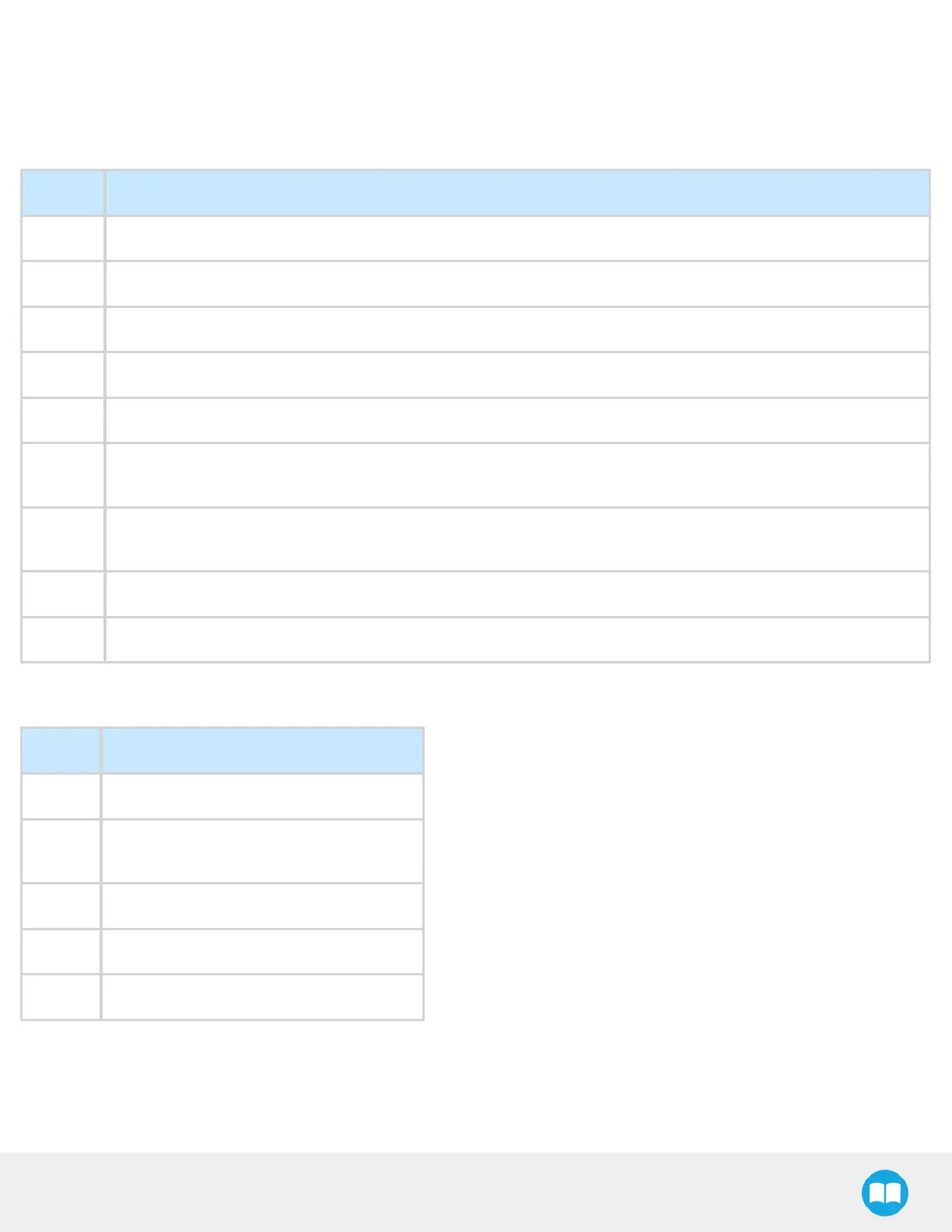
Step 4: Close the Gripper at full speed and full force
Request is: 09 10 03 E8 00 03 06 09 00 00 FF FF FF 42 29
Bits Description
09 SlaveID
10 Function Code 16 (Preset Multiple Registers)
03E8 Addressof the first register
0003 Number of registers written to
06 Number of data bytesto follow (3 registers x 2 bytes/register = 6 bytes)
0900
Value written to register 0x03E8 (ACTION REQUEST = 0x09 and GRIPPEROPTIONS= 0x00): rACT = 1 for "Activate
Gripper", rGTO = 1 for "Go to Requested Position"
00FF
Value written to register 0x03E9 (GRIPPEROPTIONS2 = 0x00 and POSITION REQUEST = 0xFF): rPR= 255/255 for
full closing of the Gripper
FFFF Value written to register 0x03EA (SPEED = 0xFF and FORCE= 0xFF): full speed and full force
4229 Cyclic Redundancy Check (CRC)
Response is: 09 10 03 E8 00 03 01 30
Bits Description
09 SlaveID
10
Function Code 16 (Preset Multiple
Registers)
03E8 Addressof the first register
0003 Number of written registers
0130 Cyclic Redundancy Check (CRC)
75