Robotiq Hand-E Gripper - Instruction Manual
4.7.4. Preset multiple registers (FC16)
Function code 06 (FC16) is used to activate functionalities of the Gripper (robot output). Examples of such data are action request,
speed, force, etc.
Example of setting multiple registers FC16:
This message requests to set position request, speed and force of the Gripper by setting register 0x03E9 (1002) and 0x03EA.
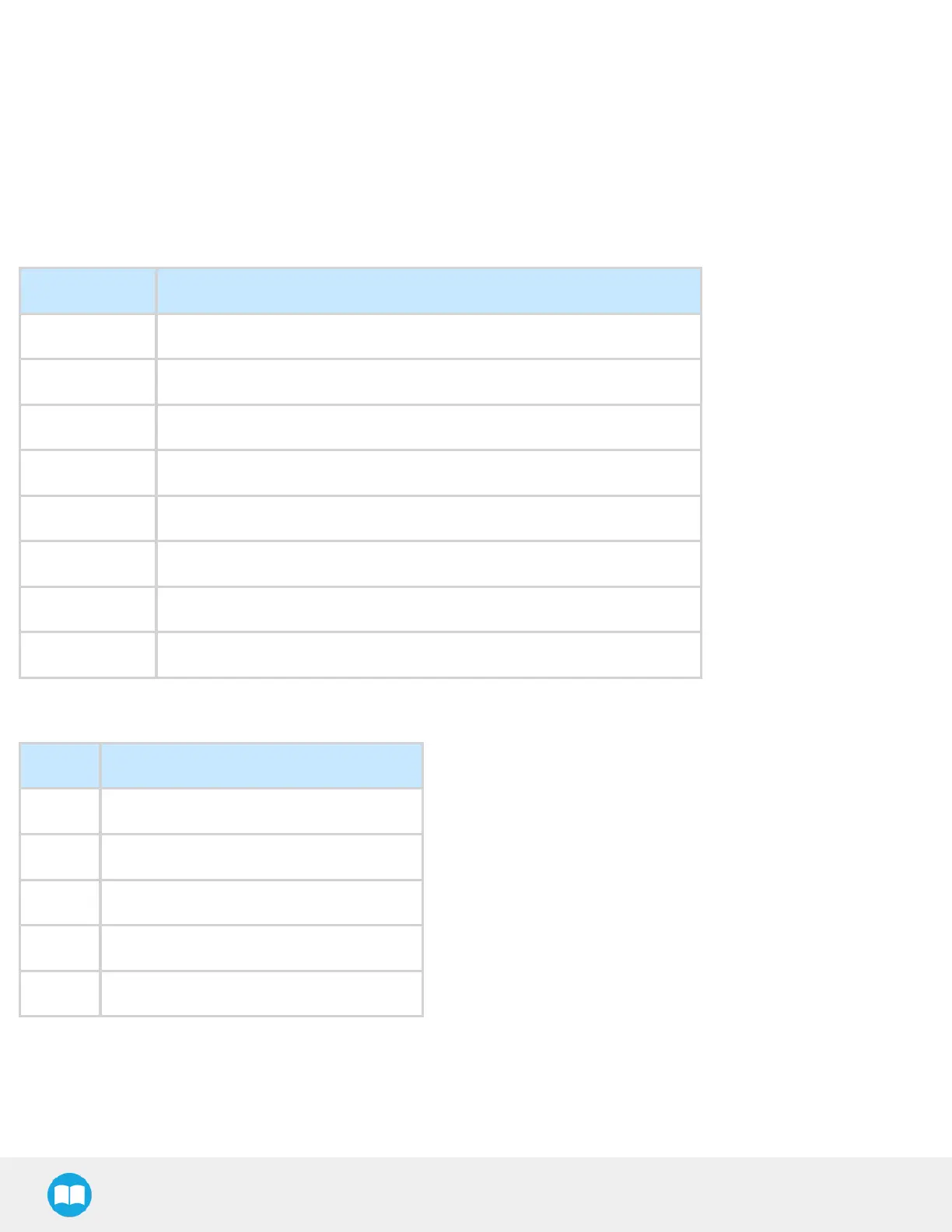
Request is: 09 10 03 E9 00 02 04 60 E6 3C C8 EC 7C
Bits Description
09 SlaveID
10 Function Code 16 (Preset Multiple Registers)
03E9 Address of the first register
0002 Number of registers written to
04 Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes)
60E6 Value written to register 0x03E9
3CC8 Value written to register 0x03EA
EC7C Cyclic Redundancy Check (CRC)
Response is: 09 10 03 E9 00 02 91 30
Bits Description
09 SlaveID
10 Function Code 16 (Preset Multiple Registers)
03E9 Address of the first register
0002 Number of written registers
9130 Cyclic Redundancy Check (CRC)
46