Centeringthe Solution
This procedure needs to be performed before installing the vacuum gripper. It will ensure the proper functioning of the Solution.
The goal is to properly align the column with the base by placing the robot wrist at a specific position when the latter is in contact
with the side of the base.
1. Connect the power supply cable to a power outlet.
2. Power on the robot.
3. Loosen the four (4)screwsthat secure the column to the base. Unscrewing the screwshalf a turn counterclockwise should
provide enough clearance to allow for the adjustment of the column’sorientation.
WARNING
Do not completely remove the screws. (i.e., do not unscrew more than half a turn). Doing so can
cause the column to tip over and, in turn, result in bodily injury and material damage.
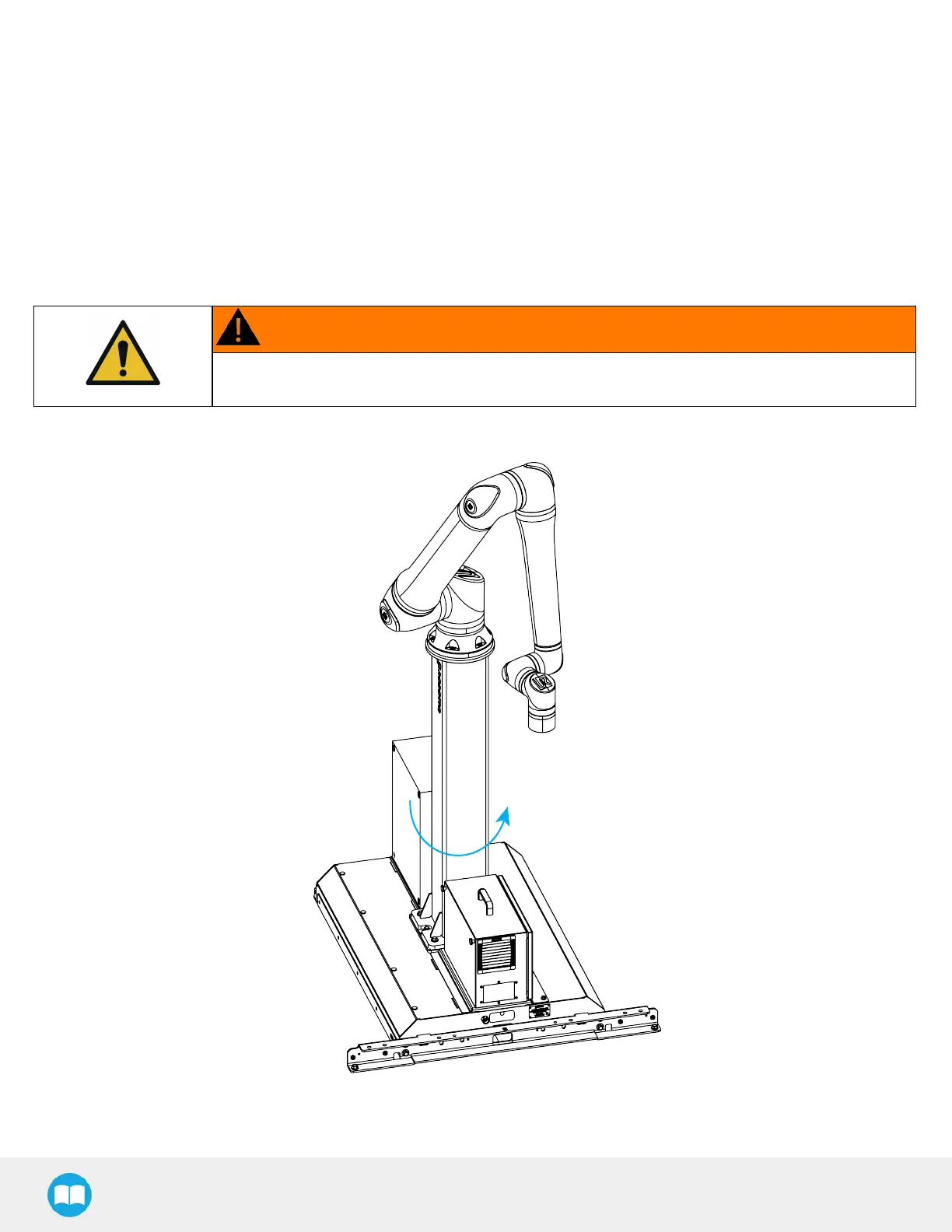
4. Rotate the column counterclockwise as much as possible.
5. Position the robot so that the wrist is on the outer left side of the base, asshown in the figure below.
41