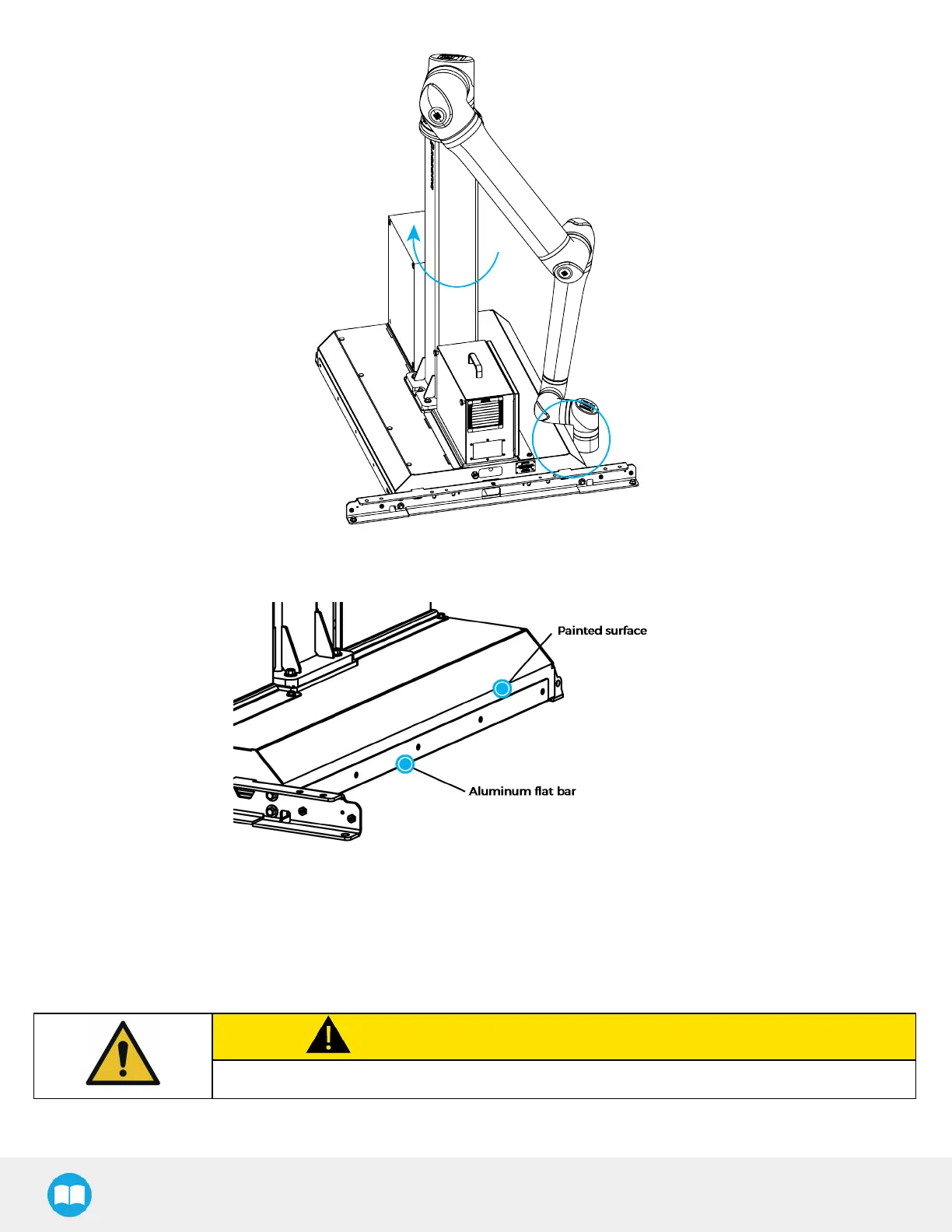
The robot wrist should be touching the painted surface approximately 25 mm (1 in) above the aluminum flat bar on the side of the
Solution.
10. Tighten the four (4) screwsto secure the pedestal to the base. Tightening torque must be 84 Nm (62 lb-ft).
11. On the teach pendant, confirm that the Xvalue of the current position is 447 mm (+/- 1 mm)and the wrist isstill in contact
with the painted surface on the side of the base.
12. When the X position iswithin the specified range, remove the M12 x 30 screws, one at a time, apply threadlocker on the
threaded part of the screws, and retighten to 84 Nm (62 lb-ft).
CAUTION
If the Xposition isoutside the specified range, repeat steps 3 to 11.
13. Put the robot back in position of use.
43