SAMWONTECH
1st Edition of TEMP880S IM : Sep. 21. 2005 Page 61 / 101
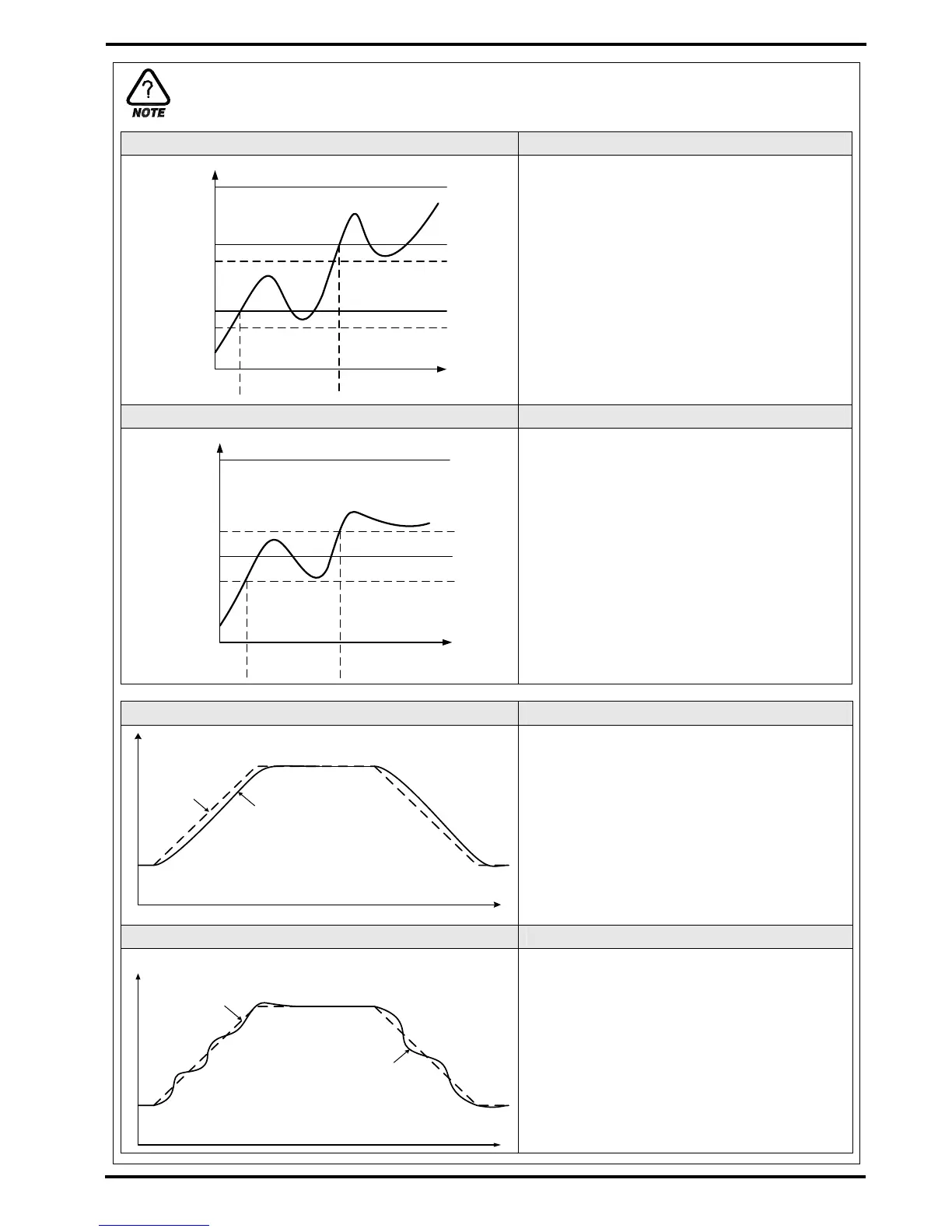
ZONE PID(PID1~3) Explanation
▶ PID group is set by pointing value (PV).
▶ Therefore, PID group may change
▶ continuously if pointing value shakes near
▶ RP1 or RP2. To prevent the frequent shake
▶ or PID group, set hysteresis (RHY).
Deviation PID(PID4) Explanation
▶ Deviation PID can be used when setting
▶ RDV. Controls deviation PID when pointing
▶ value minus setting point is bigger
▶ deviation setting point (RDV).
D.DV Control Explanation
▶ During D.DV control, since changing rate
▶ of output (MV) is small, overshoot is little
▶ and time to target setting point (TSP) is
▶ delayed a little bit.
▶ Suitable for a device which responses
▶ sensitively upon output (MV) changing
▶ rate.
D.PV Control Explanation
▶ During D.DV control, since changing rate
▶ of output (MV) is large, overshoot happens
▶ and time to target setting point (TSP) is
▶ faster than D.DV control time.
▶ Suitable for a device which responses
▶ slowly upon output (MV) changing rate.)
PID GROUP AND CONTROL MODE
RH
RL
PID4
ZONE
PID
PID4
RDV
SP
RDV
PV
RH
RP2
RHY
RP1
RHY
RL
PID1
PID2
PID3
PV
PV
SP
SP
PV