The Fundamentals of Motion Control
2-18
E Siemens AG, 2003 All rights reserved
SIMOTION C230-2, 04.2003 Edition
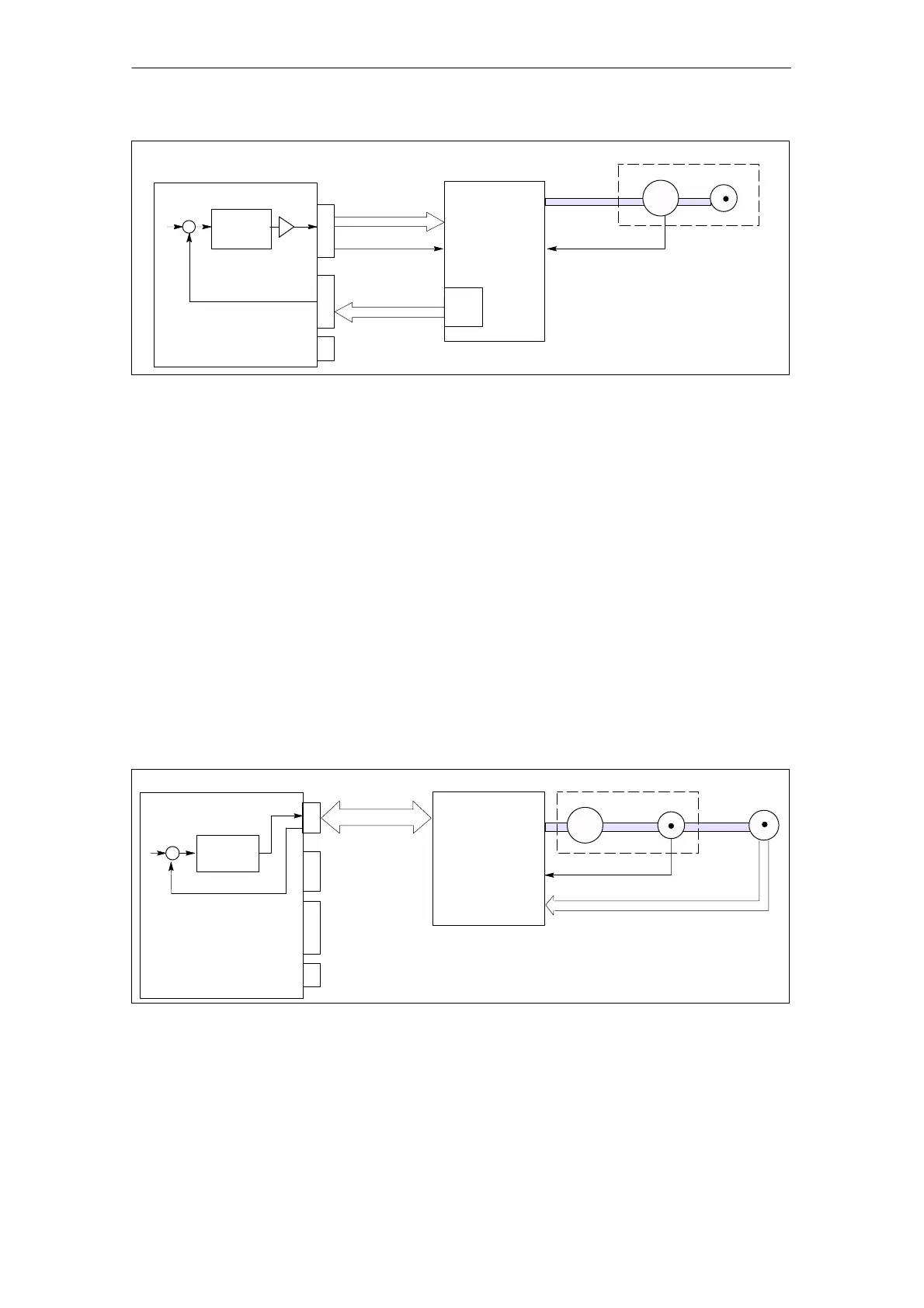
C230-2
Position
controller
+
–
DAC
X2
X3
X4
X5
X6
X1
Speed setpoint
Power section
Current controller
Speed controller
M
3
Servo motor
Rotor position
Encoder
Converter
WSG
Enable
Actual position
value, zero mark
Fig. 2-2 Servo system with converter, e.g. SIMODRIVE 611 universal, with encoder emulation
Encoder emulation
Modern motor/converter systems often have a high-resolution motor measuring
system (rotor position encoder) connected at the converter. Here the converter
provides the position information via an interface that emulates an incremental en-
coder (e.g. incremental shaft encoder (WSG) interface with SIMODRIVE). A sepa-
rate position measuring system is not required in this case.
Position-controlled motion control for servo axes (PROFIBUS DP)
The C230-2 allows the position-controlled motion of axes via PROFIBUS DP.
The following PROFIBUS protocol is used for specifying the speed setpoint and
feeding back the actual position value:
PROFIdrive profile drive technology, Version 3 (isochronous)
C230-2
Position
controller
X2
X3
X4
X5
X6
X1
Speed setpoint
Power section
Current controller
Speed controller
M
3
Servo motor
Actual speed value
Encoder
Actual position value, zero mark
Converter
X9
Actual position value
PROFIBUS DP
+
–
Fig. 2-3 Servo system with converter, e.g. SIMODRIVE 611 universal
 Loading...
Loading...





