6.12 Jogging
The "Jog" function is typically used to temporarily move a machine part using local control
commands, e.g. a transport conveyor belt.
5HDG\WRVZLWFKRQ
2SHUDWLRQ
QRMRJJLQJ
-RJJLQJ
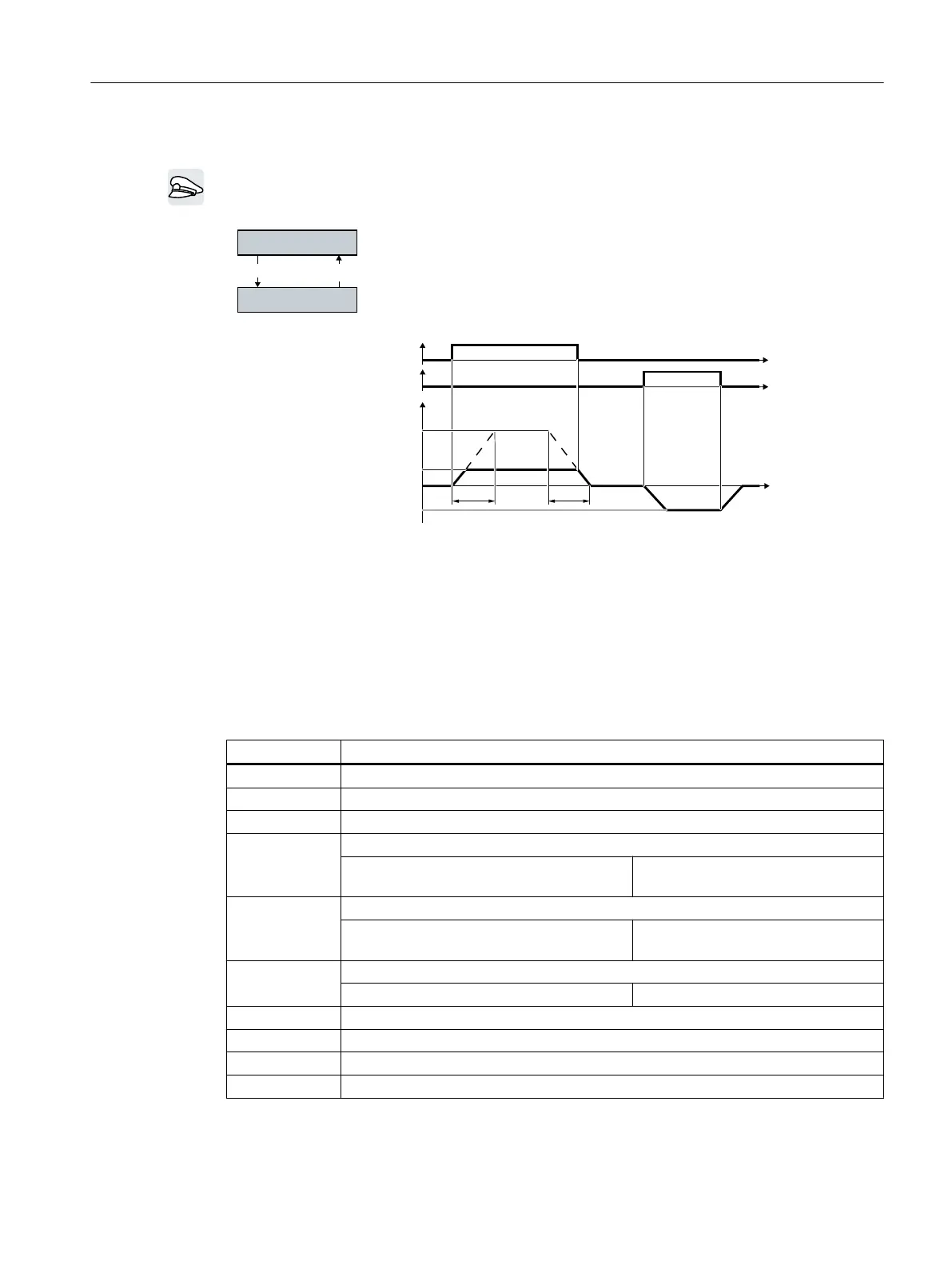
Commands "Jog 1" or "Jog: 2" switch the motor on and off.
The commands are only active when the inverter is in the "Ready for
switching on" state.
0RWRUVSHHG
0D[LPXPVSHHG
-RJJLQJ
6HWSRLQWMRJJLQJ
6HWSRLQWMRJJLQJ
-RJJLQJ
S
S
S
W
W
W
SS
Figure 6-18 Behavior of the motor when "jogging"
After switching on, the motor accelerates to the setpoint, jog 1 or setpoint, jog 2. The two
different setpoints can, for example, be assigned to motor clockwise and counter-clockwise
rotation.
When jogging, the same ramp-function generator is active as for the ON/OFF1 command.
Jog settings
Parameter Description
p1058 Jogging 1 speed setpoint (factory setting 150 rpm)
p1059 Jogging 2 speed setpoint (factory setting -150 rpm)
p1082 Maximum speed (factory setting 1500 rpm)
p1110 Inhibit negative direction
=0: Negative direction of rotation is enabled =1: Negative direction of rotation is in‐
hibited
p1111 Inhibit positive direction
=0: Positive direction of rotation is enabled =1: Positive direction of rotation is in‐
hibited
p1113 Setpoint inversion
=0: Setpoint is not inverted =1: Setpoint is inverted
p1120 Ramp-function generator ramp-up time (factory setting 10 s)
p1121 Ramp-function generator ramp-down time (factory setting 10 s)
p1055 = 722.0 Jog bit 0: Select jogging 1 via digital input 0
p1056 = 722.1 Jog bit 1: Select jogging 2 via digital input 1
Advanced commissioning
6.12 Jogging
Converter with the CU230P-2 Control Units
Operating Instructions, 09/2017, FW V4.7 SP9, A5E34257946B AE 249

 Loading...
Loading...






















