Regular Payload Series-Hardware Installation Manual TM5 Series Hardware Version:3.1 Document Version:1.01 50
Figure 40: Set to Source Input Type
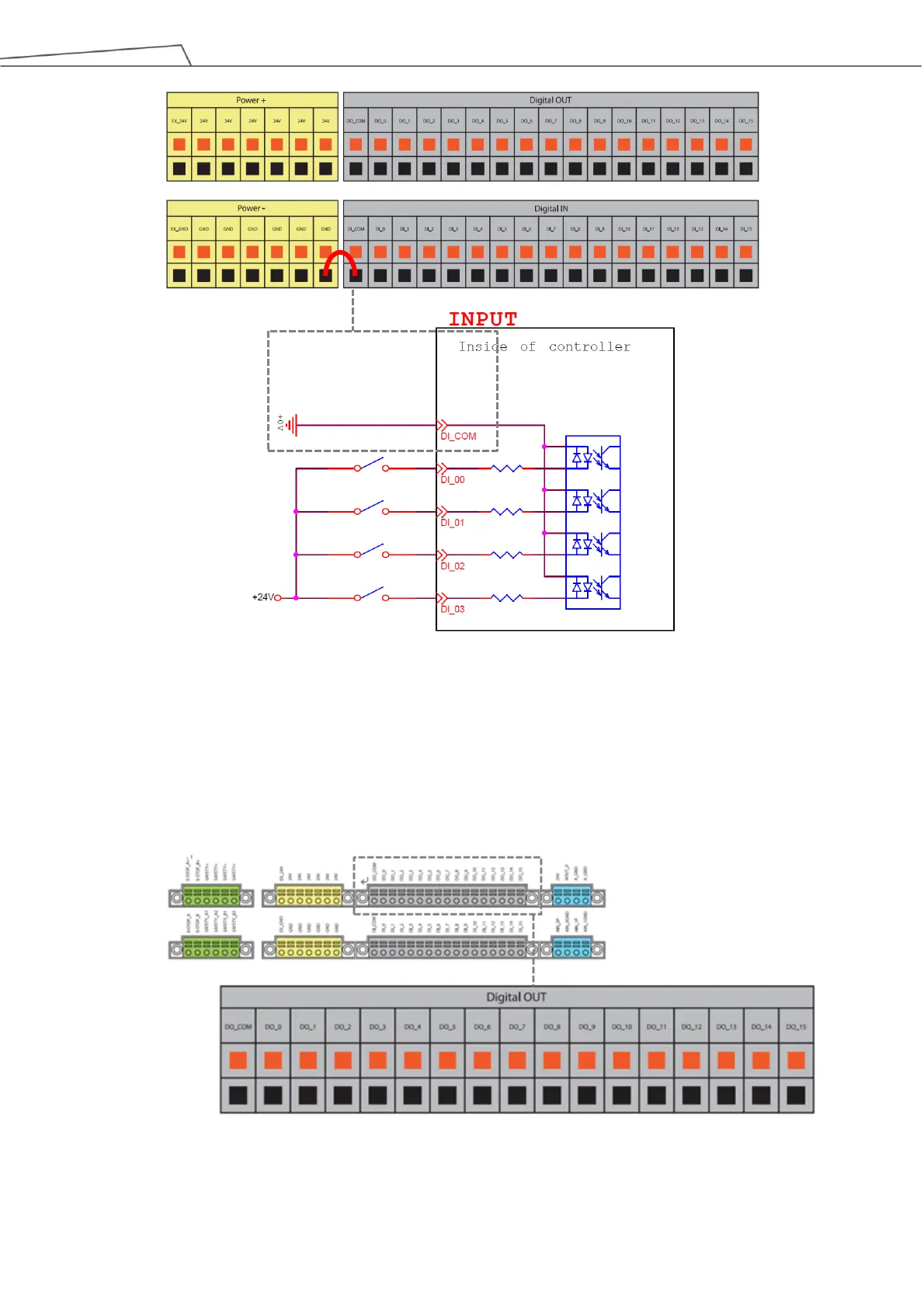
5.3.3.2 Digital Output
Outputs can be set to either sink output or source output by selection.
The maximum drive current is 300mA per channel. If the load exceeds 300mA, a relay should be used to
drive it.
Figure 41: Digital Output