Regular Payload Series-Hardware Installation Manual TM5 Series Hardware Version:3.1 Document Version:1.01 71
Figure 65: Moving the Robot Arm (1/2)
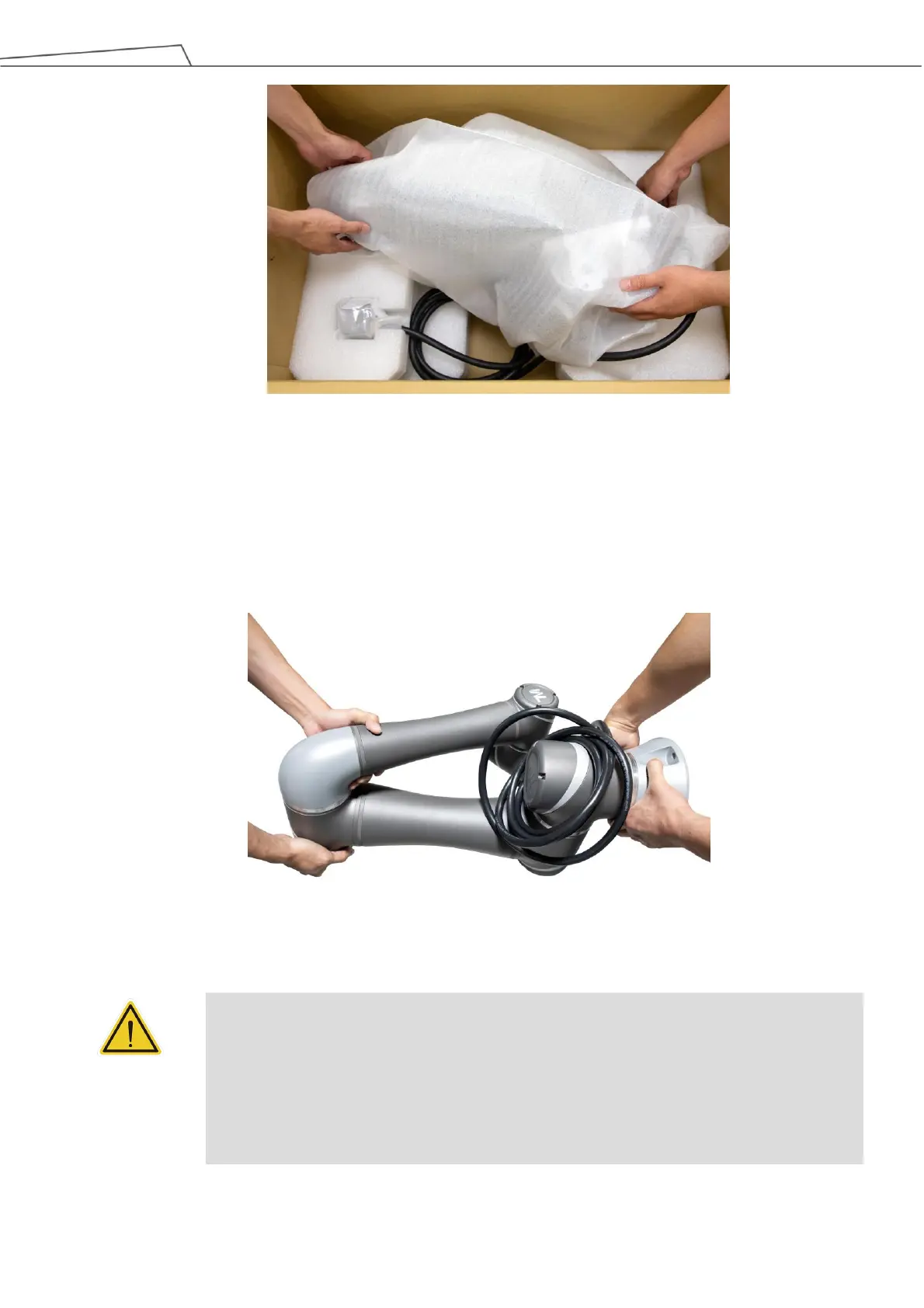
The Robot Arm itself should be handled with at least two people. One person should carry the Lower arm
and Upper arm, and the other should hold on to the position between the base and 1
st
Joint as well as the
6
th
Joint. Before the Robot Base is fastened with screws tightly, the Robot Arm should always be
supported to avoid tipping.
Figure 66: Moving the Robot Arm (2/2)
WARNING:
When the robot is installed to the base, make sure two people work together to install it. If it is
designed with pinholes, pay attention to your safety to avoid pinching. If you do not have
connection parts at hand, such as the connecting pins and screws, do not leave the robot
without completely tightening it (with the 4 screws completely tightened). One person should
continuously support the robot arm while the other person goes to get required parts.
Otherwise, the robot arm may tip, result in equipment damage or personal injury.