7.3 SERVOPACK for Fully-closed Loop Control
7-9
7
Set-up Procedure for Fully-closed Loop Control
7.3 SERVOPACK for Fully-closed Loop Control
7.3.1 Rotation/Movement Direction
The relationship between motor feedback direction and external feedback direction is dependent on the
mounted conditions. So, the parameters below are used for the coordination.
Parameter Setting
Note) Please set surely Pn000.0 and Pn002.3 by the situation above. Otherwise, the motor-load position error
overflow alarm (A.D10) occurs.
Parameter
Function Default Value When enabled
No. Dig.
Pn000 Basic Function Select Switch 0 - -
0
Direction Selection
0 After restart0 Forward command for forward direction
1 Forward command for reverse direction
Pn002 Application Function Select Switch 2 - -
3
External Encoder Usage
0 After restart
0 Do not use external encoder
1 Uses external encoder in forward rotation direction
2 Reserved (Do not change.)
3 Uses external encoder in reversed rotation direction
4 Reserved (Do not change.)
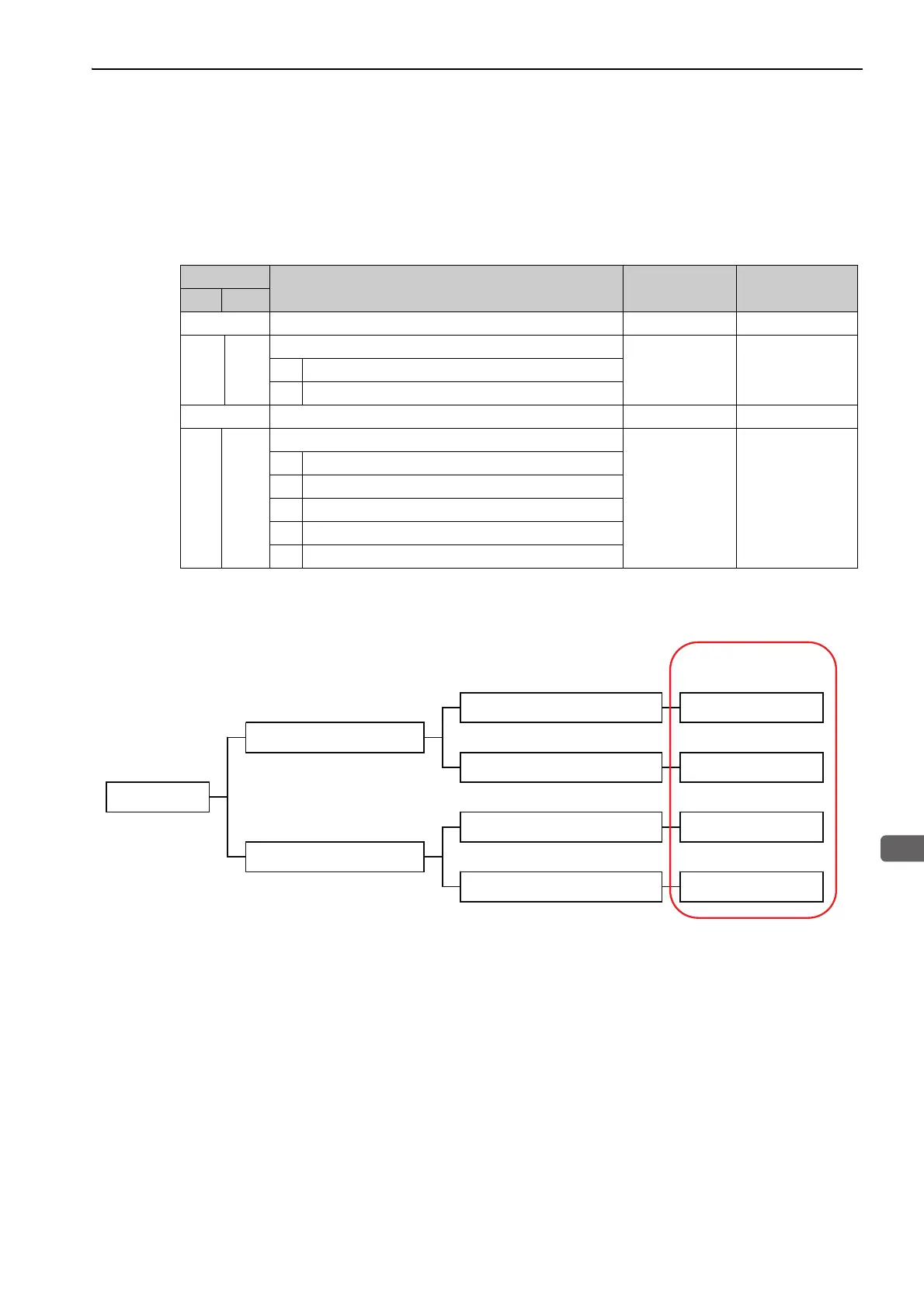
Command Monitor Monitor Parameter Setting
Desired Direction Motor Feedback pulse counter External Feedback pulse counter
Forward
(Reverse)
Un00D increase
(Un00D decrease)
Un00E increase
Un00E increase
(Un00E decrease)
(Un00E decrease)
Un00E decrease
Un00E decrease
(Un00E increase)
(Un00E increase)
Un00D decrease
(Un00D increase)
Pn000.0=0
Pn002.3=1
Pn000.0=0
Pn002.3=3
Pn000.0=1
Pn002.3=3
Pn000.0=1
Pn002.3=1

 Loading...
Loading...






