9 Motor and Scale Parameter File
9.2.1 Motor Parameters
9-4
9.2 Motor and Scale Parameter File Requirements for
SERVOPACKs for Linear Motors
If a 3rd party motor shall be operated, then a motor parameter file has to be created by Yaskawa. To cre-
ate this file, provide Yaskawa with the following information: motor data and a sample motor for check-
ing the overload characteristics. Send these information to the YASKAWA Europe Headquarter, please
find the address on the last cover page.
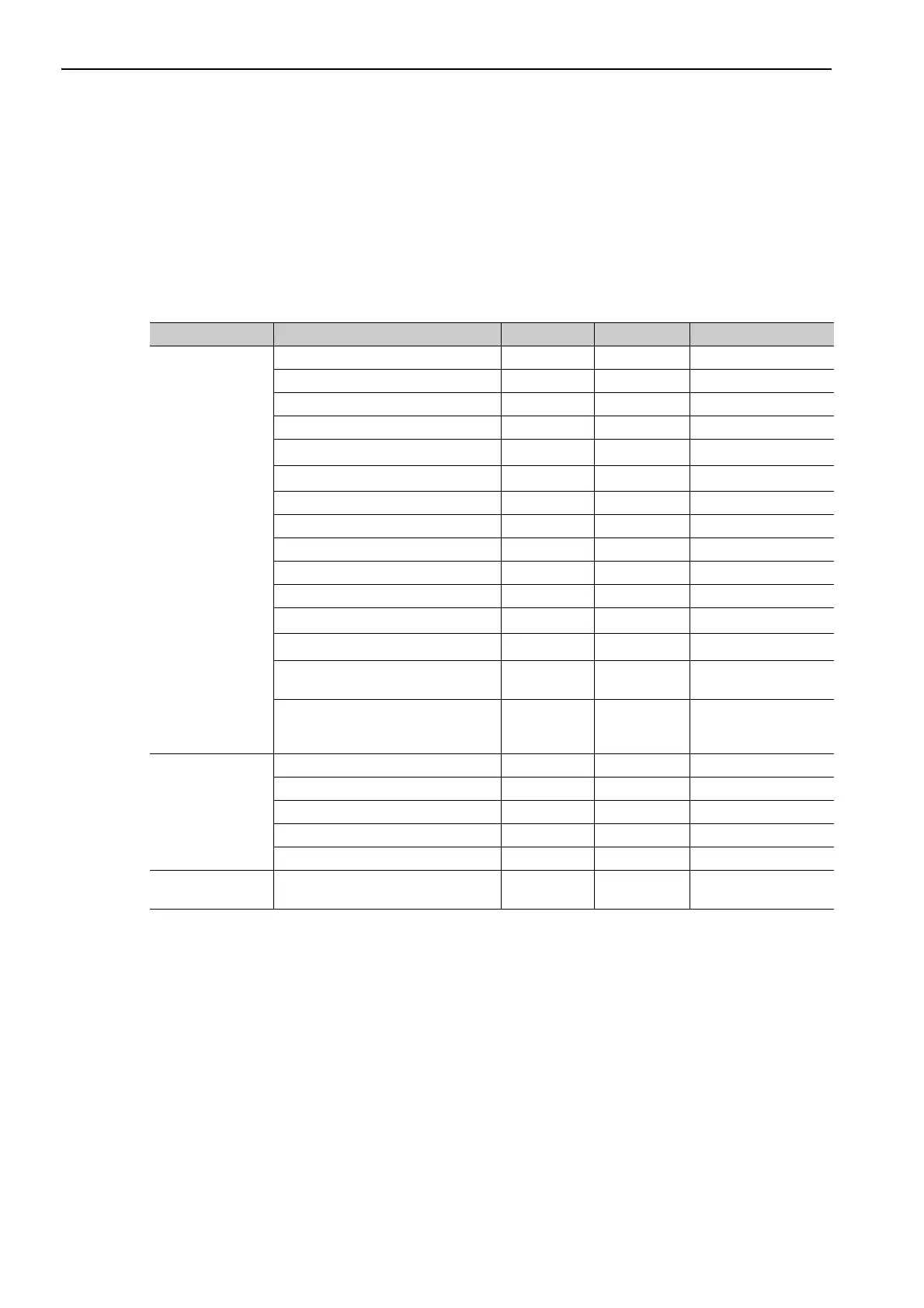
9.2.1 Motor Parameters
* M: Mandatory, O: Optional
Description Unit Category* Remarks
Characteristics
Motor voltage V M
Rated capacity W M
Rated force N M
Maximum force N M
Rated current
A
rms
M
Maximum current
A
rms
M
Rated velocity m/s M
Maximum velocity m/s M
Mass kg M
Winding resistance (per phase) M
Winding inductance (per phase) mH M
Electromotive force (per phase)
V
rms
/(m/s)
M
Pole pitch (per 180 degree)
mm
-1
M
Resonance frequency Hz O
Cancel resonance fre-
quency by motor itself
Hall sensor offset deg O
The offset between hall
sensor data and motor
phase
Overload
protection
Base torque for overload detection % M
Overload detection torque 1 % M
Overload detection time 1 sec M
Overload detection torque 2 % O
Overload detection time 2 sec O
Over-speed
protection
Over-speed detection level % O

 Loading...
Loading...







