12.6 Errors during Pole Detection Functionality
12-9
12.6 Errors during Pole Detection Functionality
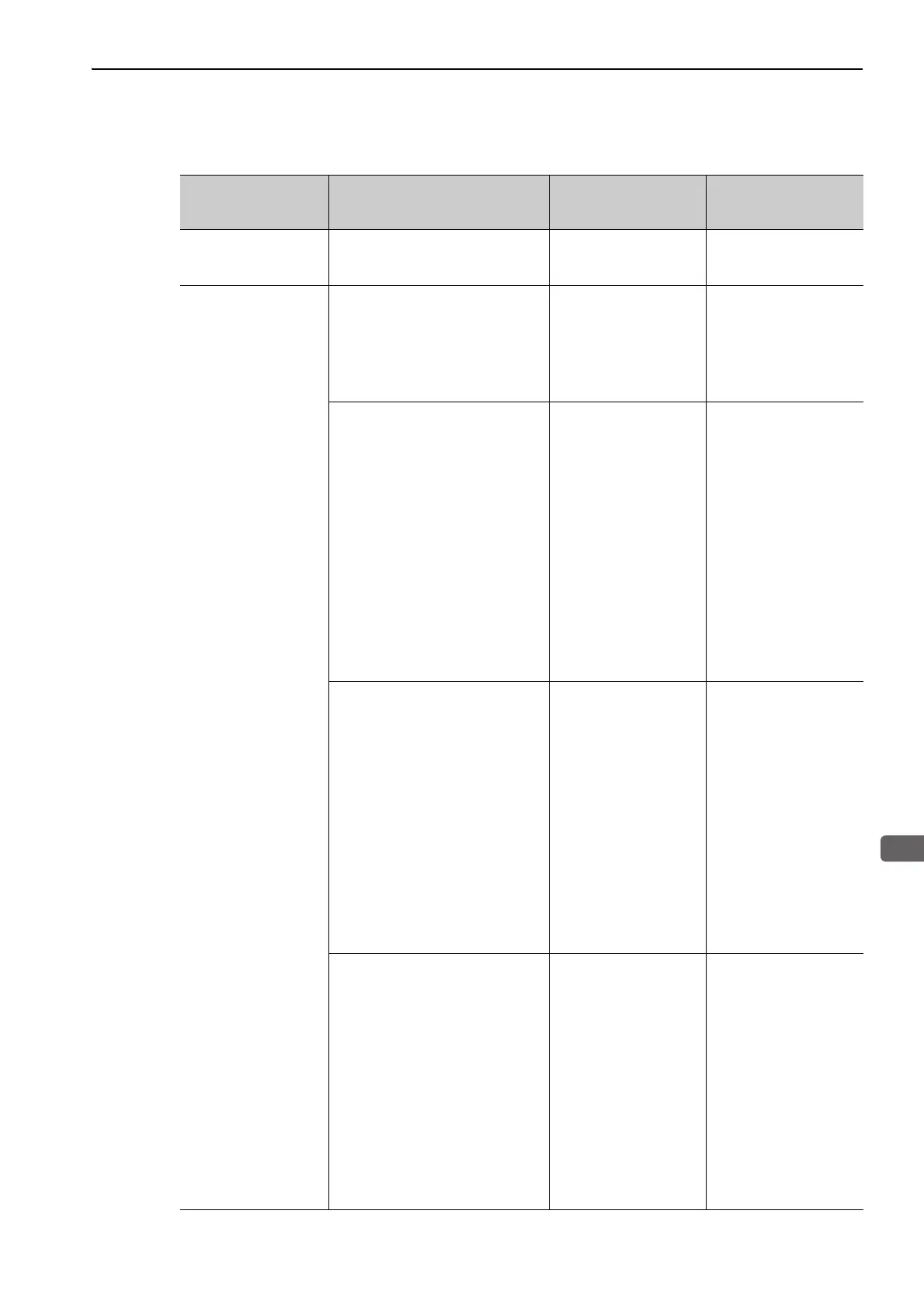
Alarm Number: Alarm
Name (Alarm
Description)
Cause Investigative Actions Corrective Actions
A.C22:
Pole Information Dis-
agreement
The SERVOPACK phase data does
not match that of the linear scale.
-
Execute polarity detec-
tion (Fn080).
A.C50:
Pole Detection Error
Parameter settings are incorrect.
Check the linear scale
specifications and feed-
back signal status.
The settings of the linear
scale pitch (Pn282) and
motor phase selection
(Pn080.1) may not match
the actual product require-
ments. Set these parame-
ters to the correct values
Noise interference occurred on the
scale signal.
Check the wiring to see if:
• Each FG of the serial
converter unit and lin-
ear servomotor is con-
nected to the FG of the
SERVOPACK.
• The FG of the SERVO-
PACK is connected to
the FG of the power
supply.
• The linear scale con-
nection cables are
securely shielded.
Check to see if the detec-
tion reference is repeat-
edly output in one
direction.
Take measures to avoid
noise interference by cor-
rectly connecting FG
lines, shielding the linear
scale connection cables,
etc.
An external force was applied to the
motor moving coil.
-
The polarity cannot be
properly detected if the
detection reference is 0
(zero), but the speed feed-
back is not 0 (zero)
because of an external
force, such as cable ten-
sion, applied to the motor
moving coil. Take mea-
sures to reduce the exter-
nal force so that the speed
feedback becomes 0 for a
0 detection reference. If
external force cannot be
reduced, increase the
polarity detection speed
loop gain (Pn481).
The linear scale resolution is too
low.
Check the linear scale
pitch to see if it is within
100 μm.
If the linear scale pitch is
100 μm or longer, the
SERVOPACK cannot
detect the correct speed
feedback. Use a scale
pitch with higher accuracy
(a pitch within 40 μm rec-
ommended.) Or, increase
the value of the polarity
detection reference speed
(Pn485). However, note
that increasing the value
of Pn485 will widen the
linear servomotor move-
ment range required for
polarity detection.

 Loading...
Loading...






