11 SERVOPACK with Semi-closed Loop Control for Linear Motors
11.4.1 Encoder Pulse Output
11-6
11.4 SERVOPACK for Linear Motors
11.4.1 Encoder Pulse Output
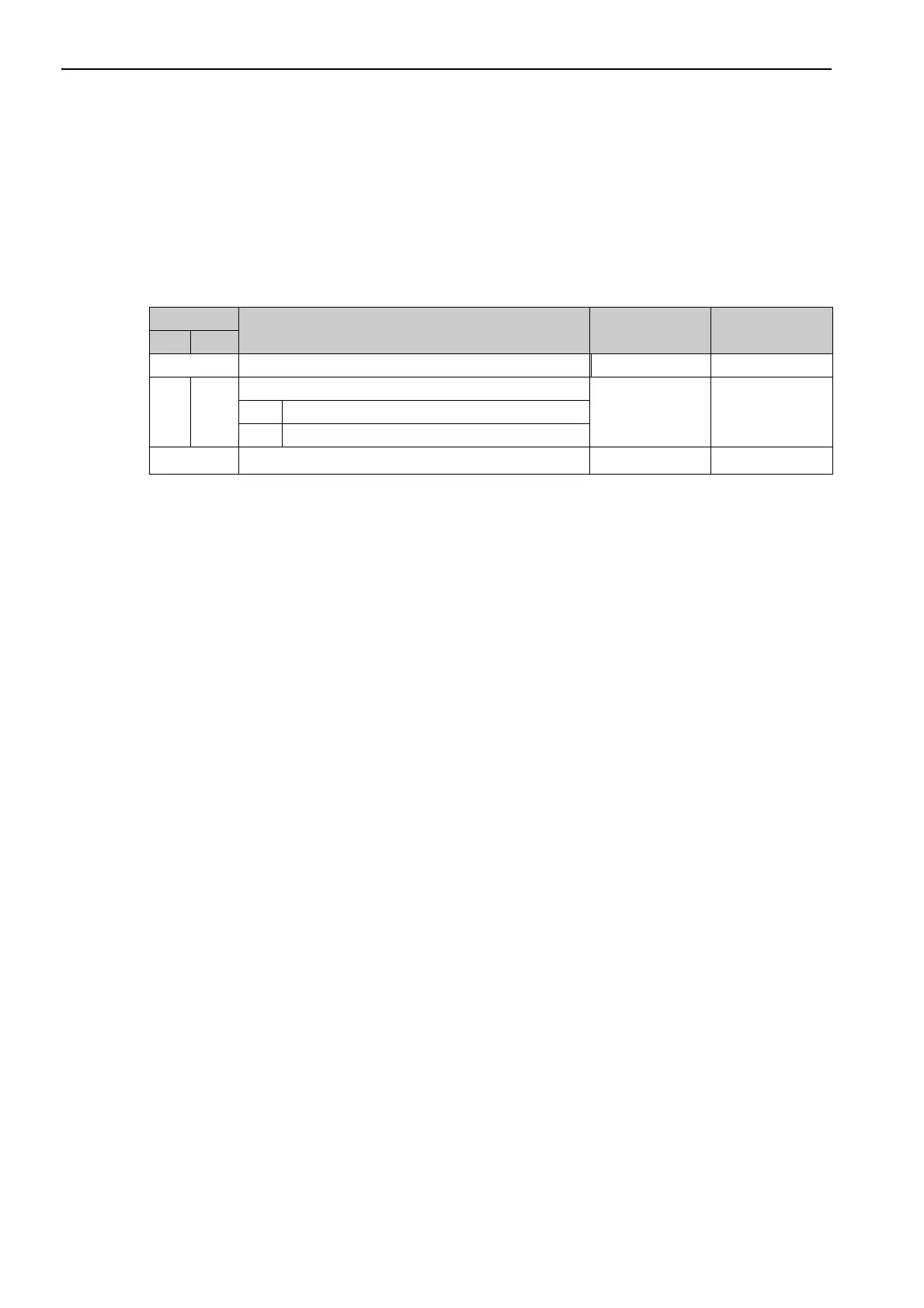
These parameters are used for position counting by upper controller. Sigma-5 SERVOPACK outputs the pulse
according to the settings. If the application does not use this encoder pulse output (e.g. network application),
the functionality can be disabled by the parameter Pn081.1 = 1
Note: C-pulse synchronizes to the edge of A/B-pulse.
Parameter
Function Default Value When enabled
No. Dig.
Pn081 Application Function Select Switch 81 - -
1
Encoder Pulse Output Usage
0 After restart0 Enables the pulse output function (Pn281)
1 Disables the pulse output function
Pn212
Encoder Output pulses [Pulse edge/Period] 20 After restart

 Loading...
Loading...







