8 Set-up Procedure for Semi-closed Loop Control
8.2.3 Sigma-5 SERVOPACK Set-up with Linear Motor
8-10
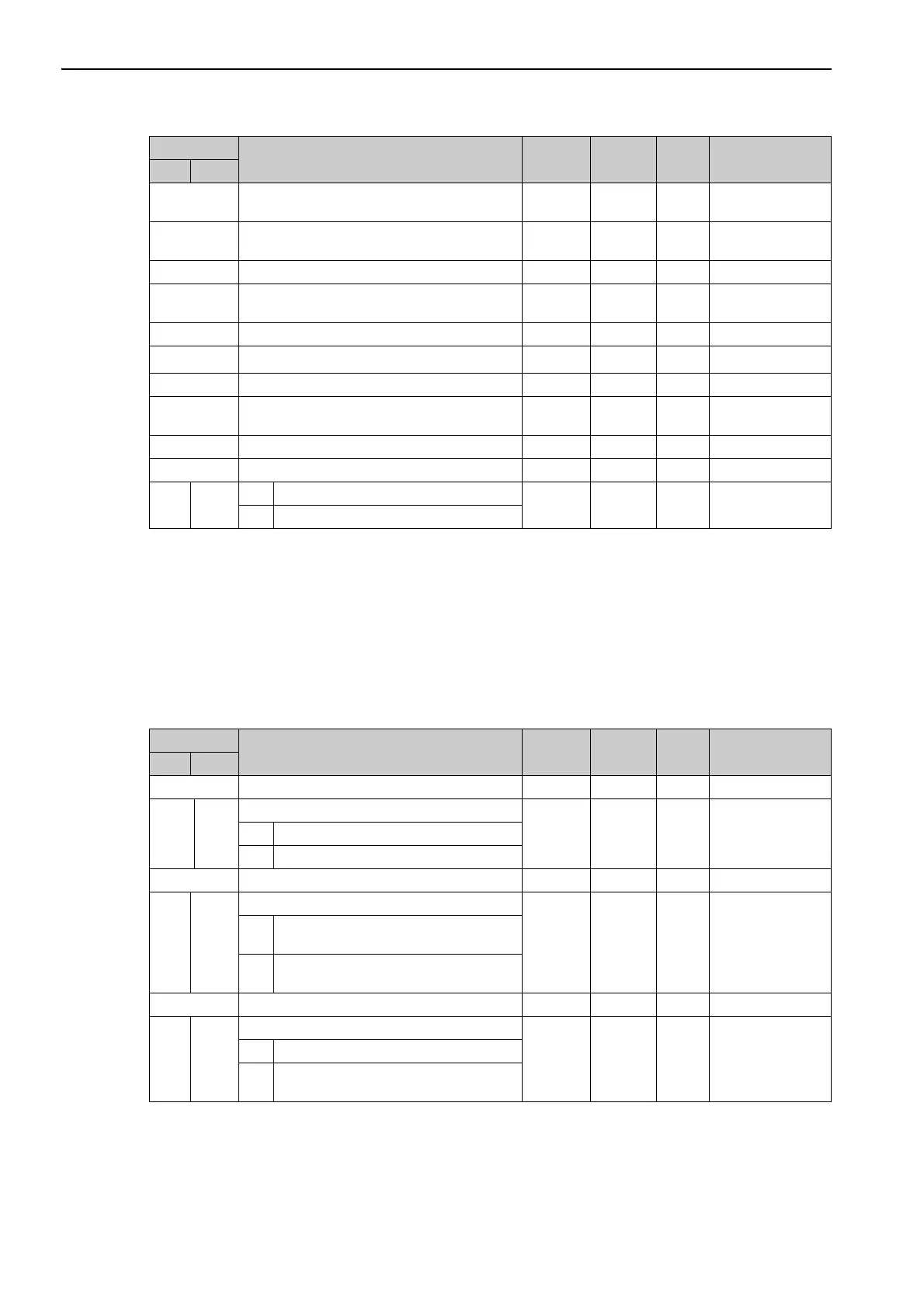
*1 these settings are dependent on the applications
*2 in case of Pn080.0=1 (Disables hall sensor), the setting is not required
*3 this is only required when using Sigma-1 motors
8.2.3 Sigma-5 SERVOPACK Set-up with Linear Motor
According to applications, these parameters should be set for the correct operation of Sigma-5 with the option
modules.
Pn482
Polarity Detection Speed Loop Integral Time
[0.01 msec]
30.00 *1 O Immediately
Pn486
Polarity Detection Command Accel/Decel Time
[msec]
25 *1 O Immediately
Pn487 Polarity Detection Constant Speed Time [msec] 0 *1 O Immediately
Pn488
Polarity Detection Command Waiting Time
[msec]
100 *1 O Immediately
Pn490 Polarity Detection Load Level [%] 100 *1 O Immediately
Pn493
Polarity Detection Command Speed [min
-1
]
50 *1 O Immediately
Pn494 Polarity Detection Range [0.001 rev] 0.250 *1 O Immediately
Pn495
Polarity Detection Confirmation Torque Com-
mand [%]
100 *1 O Immediately
Pn498 Polarity Detection Allowable Error Range [deg.] 10 *1 O Immediately
Pn587 Polarity Detection for Absolute Scale Selection - - - Immediately
0
0 Does not detect polarity
0 *1 O Immediately
1 Detects polarity
Parameter
Function
Default
Value
Required
value
Cat. When enabled
No. Dig.
Parameter
Function
Default
Value
Required
value
Cat. When enabled
No. Dig.
Pn000 Basic Function Select Switch 0 - - - -
0
Direction Selection
0 *1 O After restart0 Forward command for forward direction
1 Forward command for reverse direction
Pn002 Application Function Select Switch 2 - - - -
2
Absolute Encoder Usage
0 *1 O After restart
0
Uses absolute encoder as an absolute
encoder
1
Uses absolute encoder as an incremental
encoder
Pn00B Application Function Select Switch B - - - -
3
Feedback Option Module Usage
0 *1 M After restart
0 Uses CN2 for external encoder feedback
1
Uses FB option for motor encoder feed-
back

 Loading...
Loading...







