11 SERVOPACK with Semi-closed Loop Control for Linear Motors
11-2
11.1 Magnetic Pole
For driving linear motors, the magnetic pole should be coordinated. The parameters in the following table are
used for that.
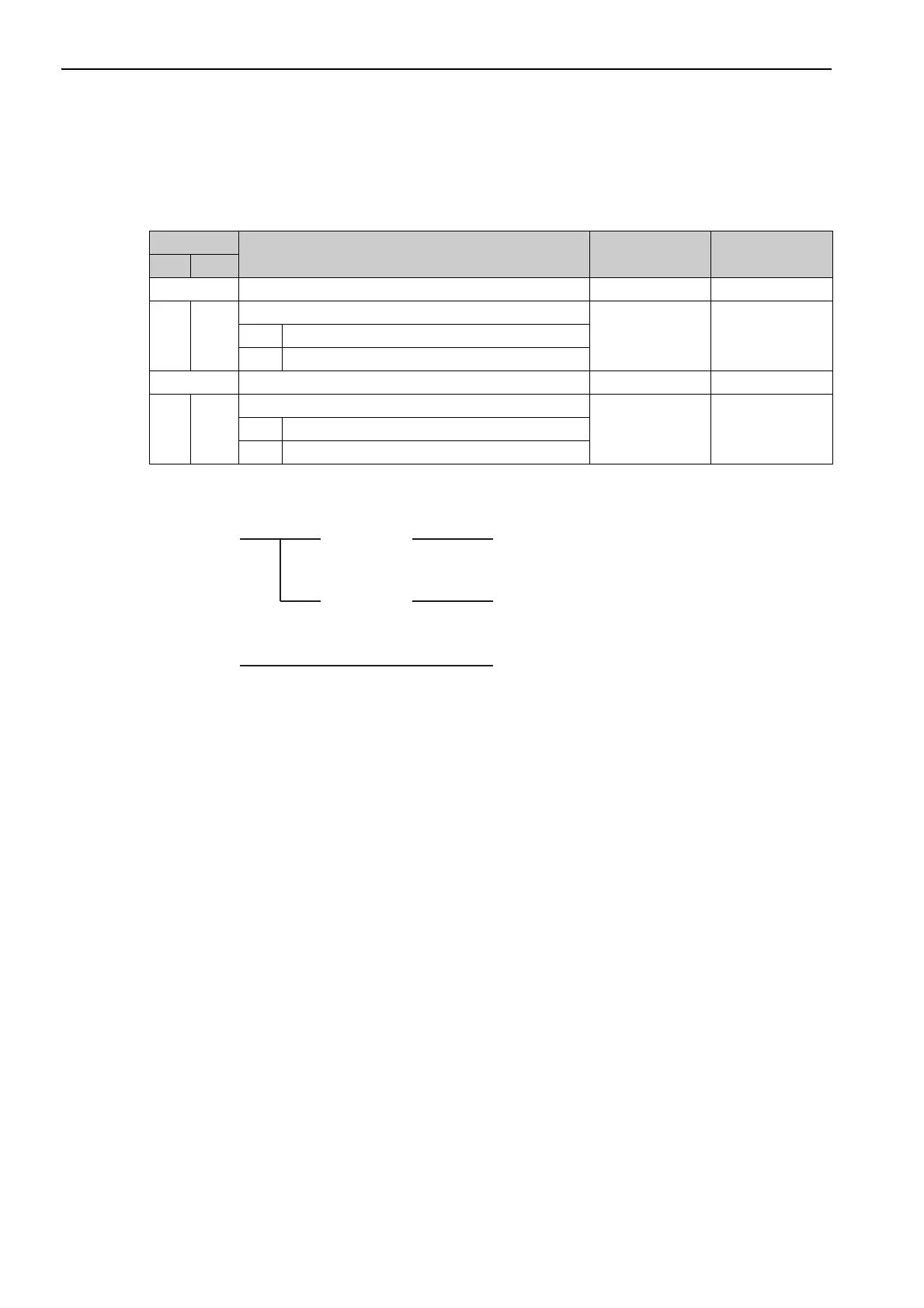
Parameter Setting
Note: In case the hall sensor is not available refer to chapter 11-4.
Parameter
Function Default Value When enabled
No. Dig.
Pn080 Application Function Select Switch 80 - -
0
Hall Sensor Selection
0 After restart0 Enables hall sensor
1 Disables hall sensor
Pn081 Application Function Select Switch 81 - -
3
Hall Sensor Signal Inversion
0 After restart0 Does not inverse the signals (Pos-Logic)
1 Inverses the signals (Neg-Logic)
Positive logic Pn080.0 = 0
Pn081.3 = 0
Pn080.0 = 0
Pn081.3 = 1
Pn080.0 = 1
Pn081.3 = 0
Negative logic
Available
Not available
Hall Sensor Hall Sensor Signal Parameter Setting

 Loading...
Loading...







