Refitting the upper arm
Use these procedures to refit the upper arm.
Preparations before refitting the upper arm
NoteAction
Wipe clean all contact surfaces.1
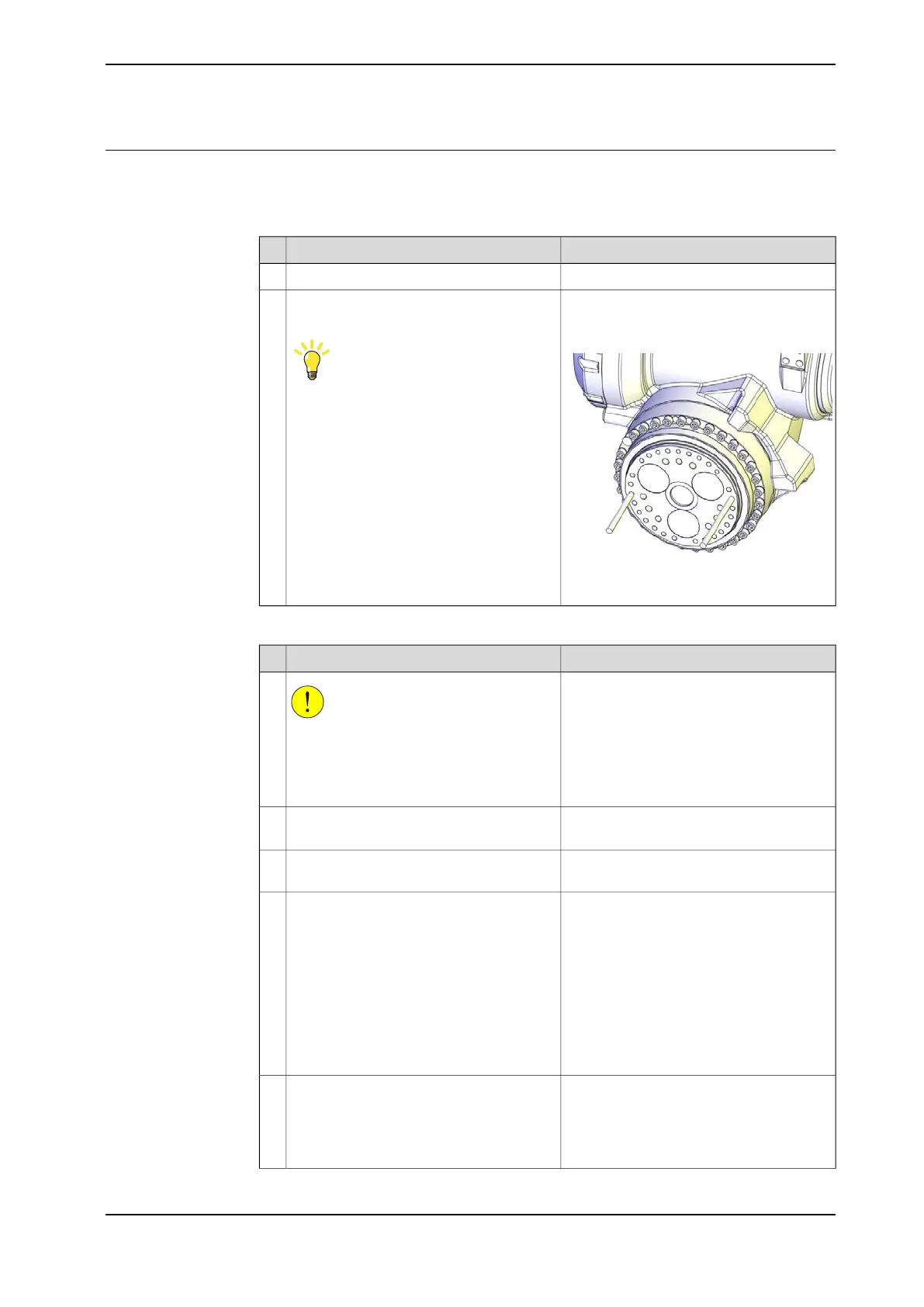
Guide pin, M12x150: 3HAC13056-2Fit two guide pins in opposite M12 holes
in the axis-3 gearbox.
Tip
Lubricate the guide pins with some grease
to make the upper arm slide better.
2
Guide pin, M12x200: 3HAC13056-3
Always use guide pins in pairs.
xx1700000058
Securing the upper arm
NoteAction
CAUTION
The weight of the complete upper arm (in-
cluding the wrist) is 360 kg
All lifting accessories used must be sized
accordingly.
1
See Attaching lifting accessories to the
upper arm on page 184.
Attach the lifting accessories, if not already
fitted.
2
Lift the upper arm and put it on the guide
pins.
3
24 VDC power supplyIf the axis-3 motor is installed to the upper
arm:
4
Rotation tool
In order to release the brakes, connect the
24 VDC power supply.
Connect to R2.MP3-connector:
• + = pin 2
• - = pin 5
Use the rotation tool and rotate the axis-3
motor to find the correct position for the
guide pins in the lower arm.
Pinion: 3HAC067546-001If the axis-3 motor is not installed to the
upper arm:
5
Use the pinion to rotate the axis-3 gearbox
to find the correct position for the guide
pins in the lower arm.
Continues on next page
Product manual - IRB 6790 271
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.5.1 Replacing the upper arm
Continued
 Loading...
Loading...

