NoteAction
xx1700002042
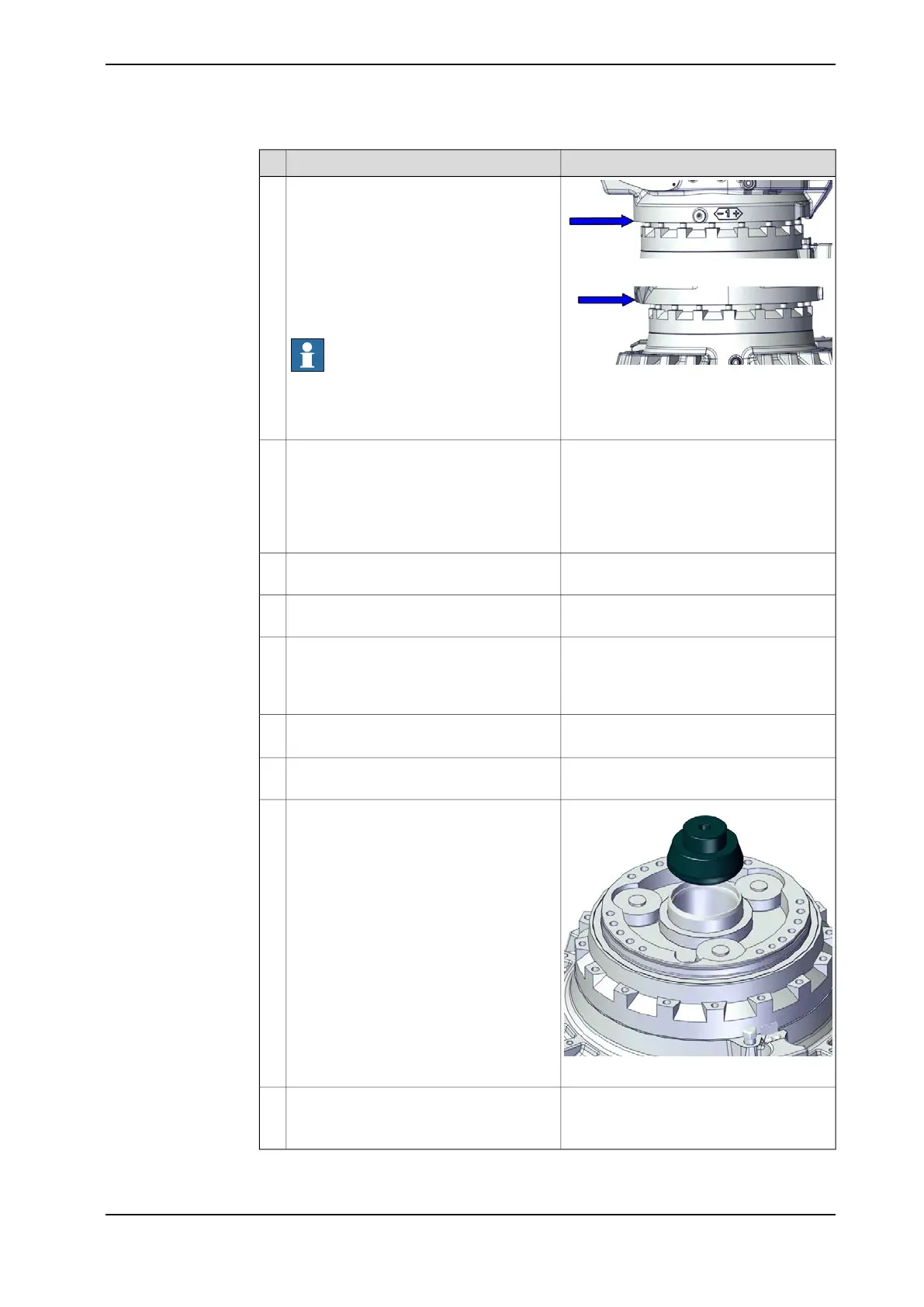
Lower the arm system slowly until the
heads of the gearbox attachment screws
are starting to disappear inside the frame
edge.
Verify visually from the side and from the
front/back that the frame is coming down
completely level against the gearbox. If the
frame is somewhat tilted, adjust the lifting
position with the overhead crane.
Note
While lowering the complete arm system,
check that the cylindrical pin is fitted cor-
rectly.
13
xx1700002043
This is done to be sure that all screws will
enter the gears correctly.
When the arm system is almost in position,
fit the accessible attachment screws
manually (no tools).
14
Attachment screws: M16x50 Stainless Steel
(3HAC060786-041) (16 pcs)
Washers: 17x15x3 Stainless Steel
(3HAC060866-005) (16 pcs)
Use caution and lower the complete arm
system into position on top of the gearbox.
15
Tightening torque: 300 Nm.Secure the complete arm system to the
axis-1 gearbox with its attachment screws.
16
Tightening torque: 300 Nm.Remove the two guide pins and replace
with attachment screws.
17
Tighten the remaining, accessible attach-
ment screws.
See Performing a leak-down test on
page 166.
Perform a leak-down test.18
Remove the aligning tool, after the leak-
down test is completed successfully.
19
xx1700002038
Remove the guide for the reduction gear.20
Remove the lifting accessories.21
Refit stop screws in the lifting accessory
attachment holes.
Continues on next page
Product manual - IRB 6790 531
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.8.1 Replacing the axis-1 gearbox
Continued