62 Start-up, control with I/O and ID run
5. Press and hold for about two seconds until the
parameter value is shown with under the value.
6. Change the value with keys / . The value
changes faster while you keep the key pressed
down.
7. Save the parameter value by pressing .
Select the application macro (parameter 9902)
according to how the control cables are
connected.
The default value 1 (ABB STANDARD) is suitable in
most cases.
Select the motor control mode (parameter 9904).
1(VECTOR: SPEED) is suitable in most cases.
2(VECTOR: TORQ) is suitable for torque control
applications.
3(SCALAR: FREQ) is recommended
• for multimotor drives when the number of the motors
connected to the drive is variable
• when the nominal current of the motor is less than
20% of the nominal current of the drive
• when the drive is used for test purposes with no motor
connected.
3(SCALAR: FREQ) is not recommended for permanent
magnet motors.
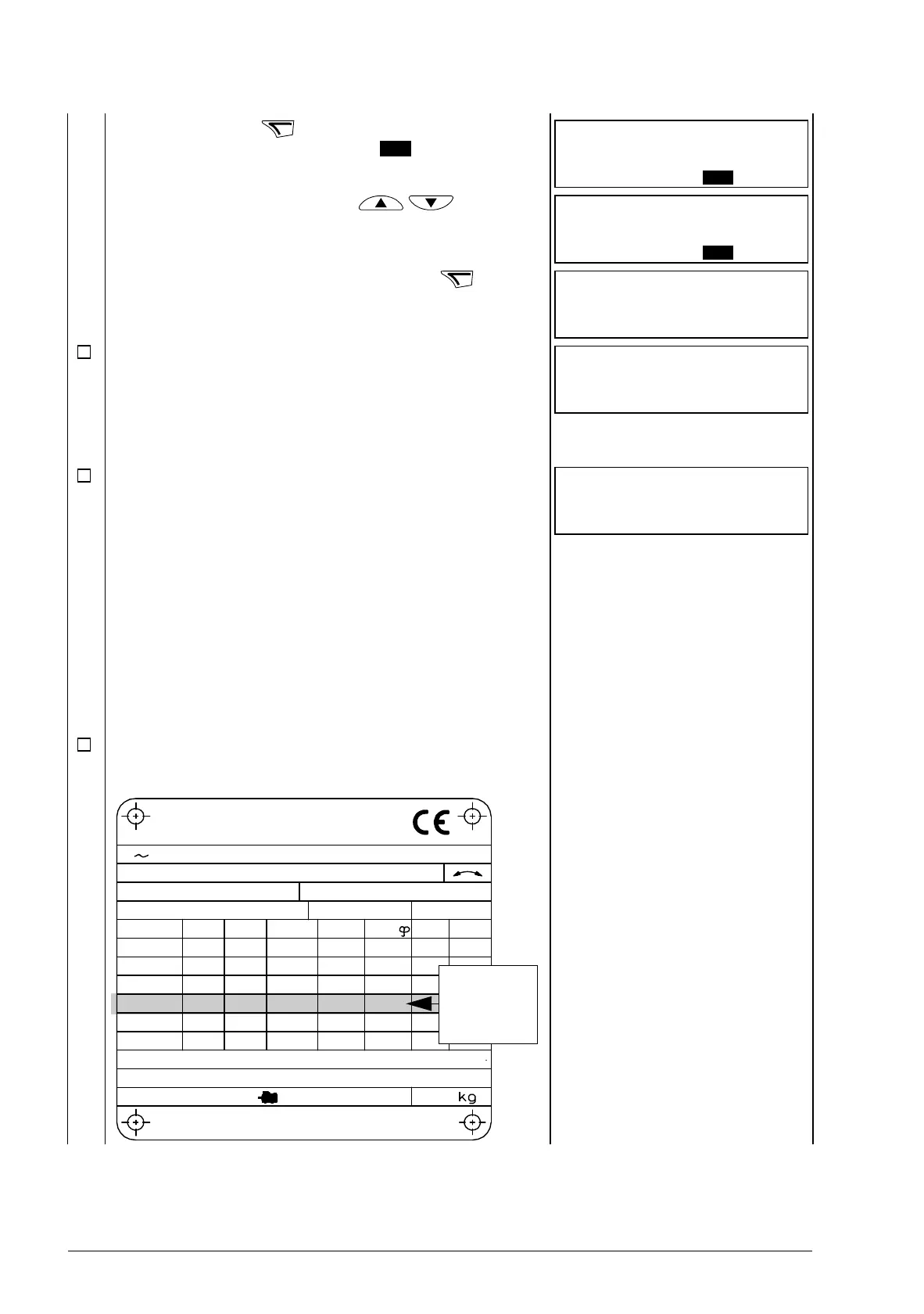
Enter the motor data from the motor nameplate.
Asynchronous motor nameplate example:
Note: Set the motor data to
exactly the same value as on
the motor nameplate. For
example, if the motor nominal
speed is 1440 rpm on the
nameplate, setting the value of
parameter 9908 MOTOR NOM
SPEED to 1500 rpm results in
the wrong operation of the drive.
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors