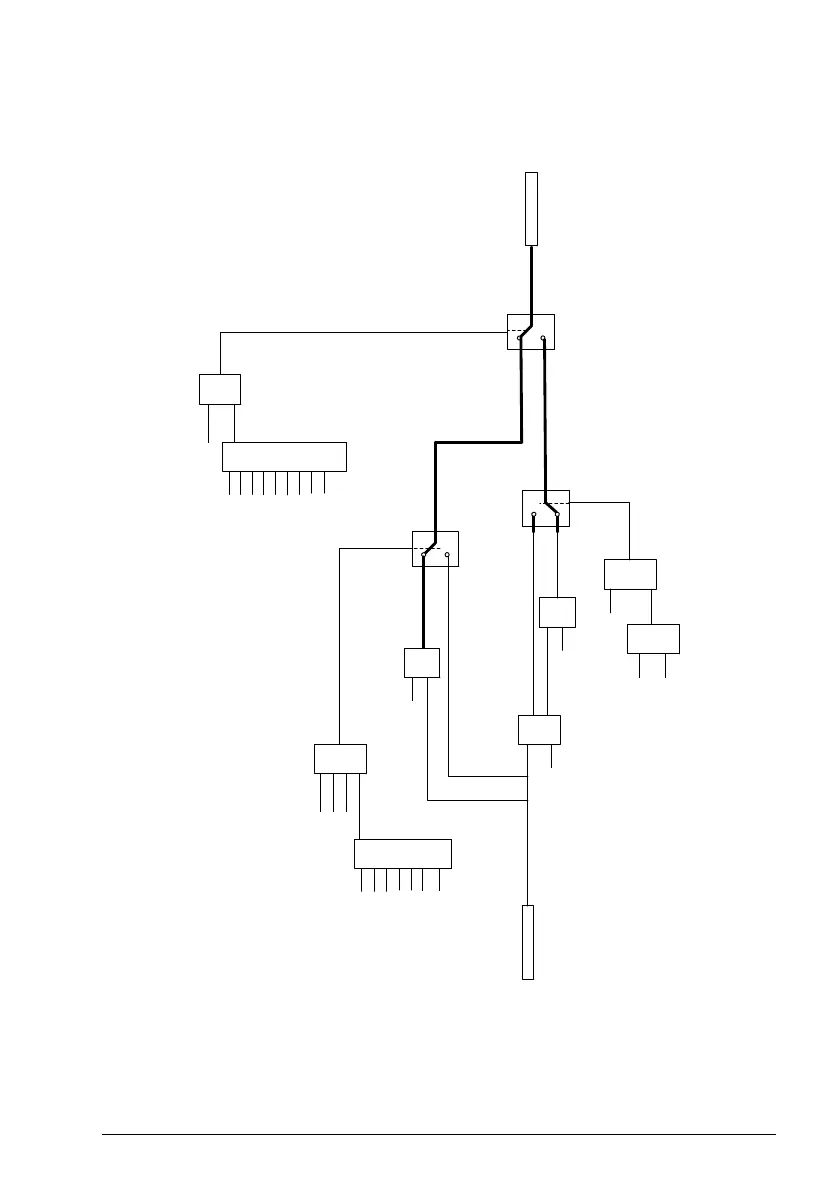
Output reference
Input reference
20.21 Direction = Request
AND
OR
Reference from FB
Reference from Motor potentiometer
Jogging Reference
Last/Safe reference
Constant reference
Reference from AP program
Reference from PID
Reference from Panel
Reference from AI
OR
Reference from FB
Reference from Motor potentiometer
Reference from Panel
Last/Safe reference
Reference from AI
Reference from AP program
OR
20.21 Direction = Reverse
AND
20.21 Direction = Request
Reverse command active
X
MAX
X
-1
-1
0
AND
20.21 Direction = Request
Reverse command active
Input reference > 0
Reference from Network