Program features 69
or fan applications. For these applications, the torque required follows the square
relationship with frequency. Therefore, if the voltage is varied using the square
relationship, the motor operates at improved efficiency and lower noise levels in
these applications.
The U/f function cannot be used with energy optimization. If parameter 45.11 Energy
optimizer is set to Enable, parameter 97.20 U/F ratio is ignored.
Settings
Parameter 97.20 U/F ratio (page 363).
Flux braking
The drive can provide greater deceleration by raising the level of magnetization in the
motor. By increasing the motor flux, the energy generated by the motor during
braking can be converted to motor thermal energy.
The drive monitors the motor status continuously, also during flux braking. Therefore,
flux braking can be used both for stopping the motor and for changing the speed. The
other benefits of flux braking are:
• The braking starts immediately after a stop command is given. The function does
not need to wait for the flux reduction before it can start the braking.
• The cooling of the induction motor is efficient. The stator current of the motor
increases during flux braking, not the rotor current. The stator cools much more
efficiently than the rotor.
• Flux braking can be used with induction motors.
Two braking power levels are available:
• Moderate braking provides faster deceleration compared to a situation where flux
braking is disabled. The flux level of the motor is limited to prevent excessive
heating of the motor.
• Full braking exploits almost all available current to convert the mechanical braking
energy to motor thermal energy. Braking time is shorter compared to moderate
braking. In cyclic use, motor heating may be significant.
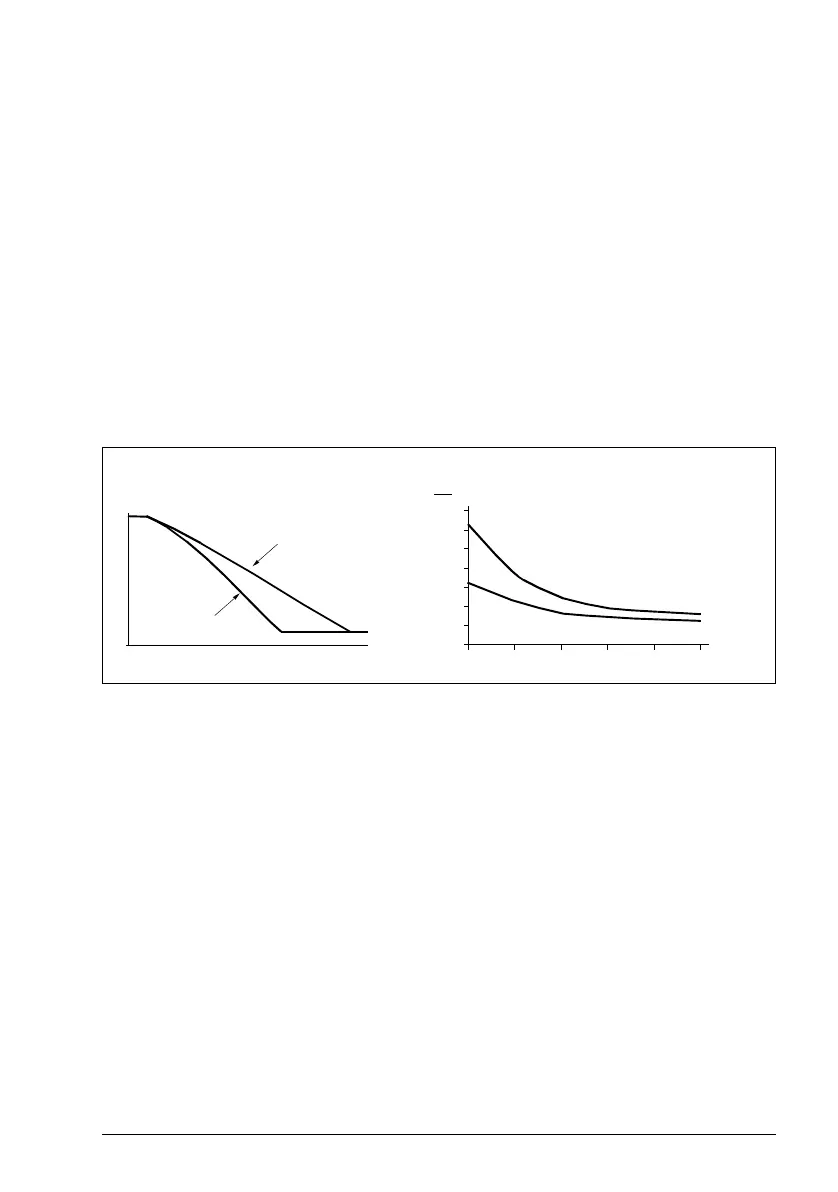
T
Br
20
40
60
(%)
Motor
speed
No flux braking
Flux braking
T
Br
= Braking torque
= 100 Nm
Flux braking
No flux braking
t (s)
f (Hz)