Program features 73
Example 2: If the reference switching frequency is set to 12 kHz and the minimum
switching frequency is set to the smallest available value, the drive maintains the
highest possible switching frequency to reduce motor noise and only when the drive
heats it will decrease the switching frequency. This is useful, for example, in
applications where low noise is necessary but higher noise can be tolerated when the
full output current is needed.
Settings
Parameter 97.01 Switching frequency reference and 97.02 Minimum switching
frequency (page 352).
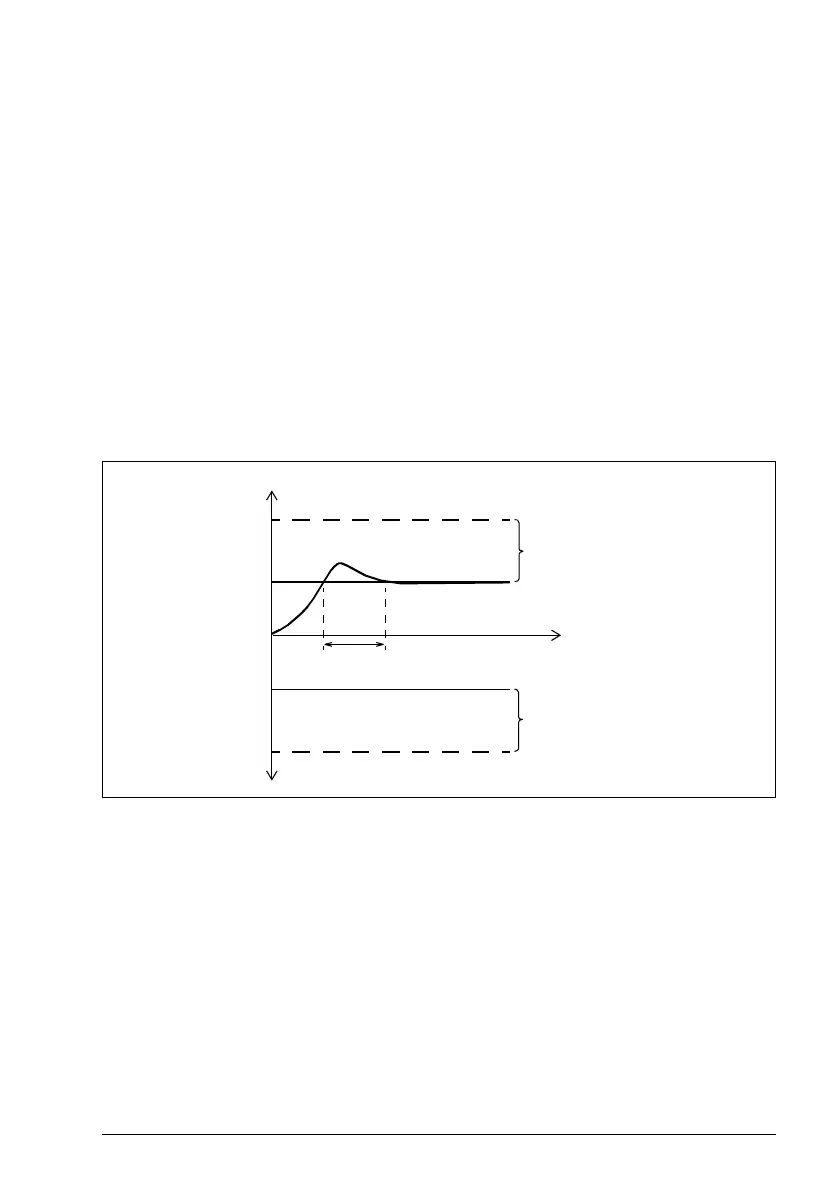
Rush control
In torque control, the motor could potentially rush if the load were suddenly lost. The
control program has a rush control function that decreases the torque reference
whenever the motor speed exceeds 30.11 Minimum speed or 30.12 Maximum speed.
The function is based on a PI controller. The program sets the proportional gain to
10.0 and integration time to 2.0 s.
Settings
Parameters 26.81 Rush control gain (page 239) and 26.82 Rush control integration
time (page 239)
Jogging
The jogging function enables the use of a momentary switch to briefly rotate the
motor. The jogging function is typically used during servicing or commissioning to
control the machinery locally. The function is available in both scalar and vector
control. In vector control mode, the jogging speed reference is provided by
parameters 22.42 Jogging 1 ref and 22.43 Jogging 2 ref. In scalar control mode, the
Motor speed
Time
Overspeed trip level
Overspeed trip level
31.30 Overspeed trip margin
0
31.30 Overspeed trip margin
30.12
30.11
Rush control active