90 G12 OEM Board & Sensor Reference Manual
PSM: Navigation Mode Filtering
$PASHS,PSM,x
This command allows you to enable or disable the position/velocity filter that
smooths the position and velocity output by reducing the short term noise effects.
Table 4.34 lists the filtering models available to suit the navigation mode.
RID: Receiver Identification Parameters (Format 1)
$PASHQ,RID,[c1]
This command allows you to query various receiver identification parameters,
where c1 is the optional port designator for the output of the response. If a port is
not specified, the receiver sends the response to the current port.
When you contact customer support, the customer support agent will request the response to the
$PASHQ,RID command for your receiver.
2 1200 7 38400
3 2400 8 56800
4 4800 9 115200
DEFAULT SETTING
PRT—5 (9600 baud)
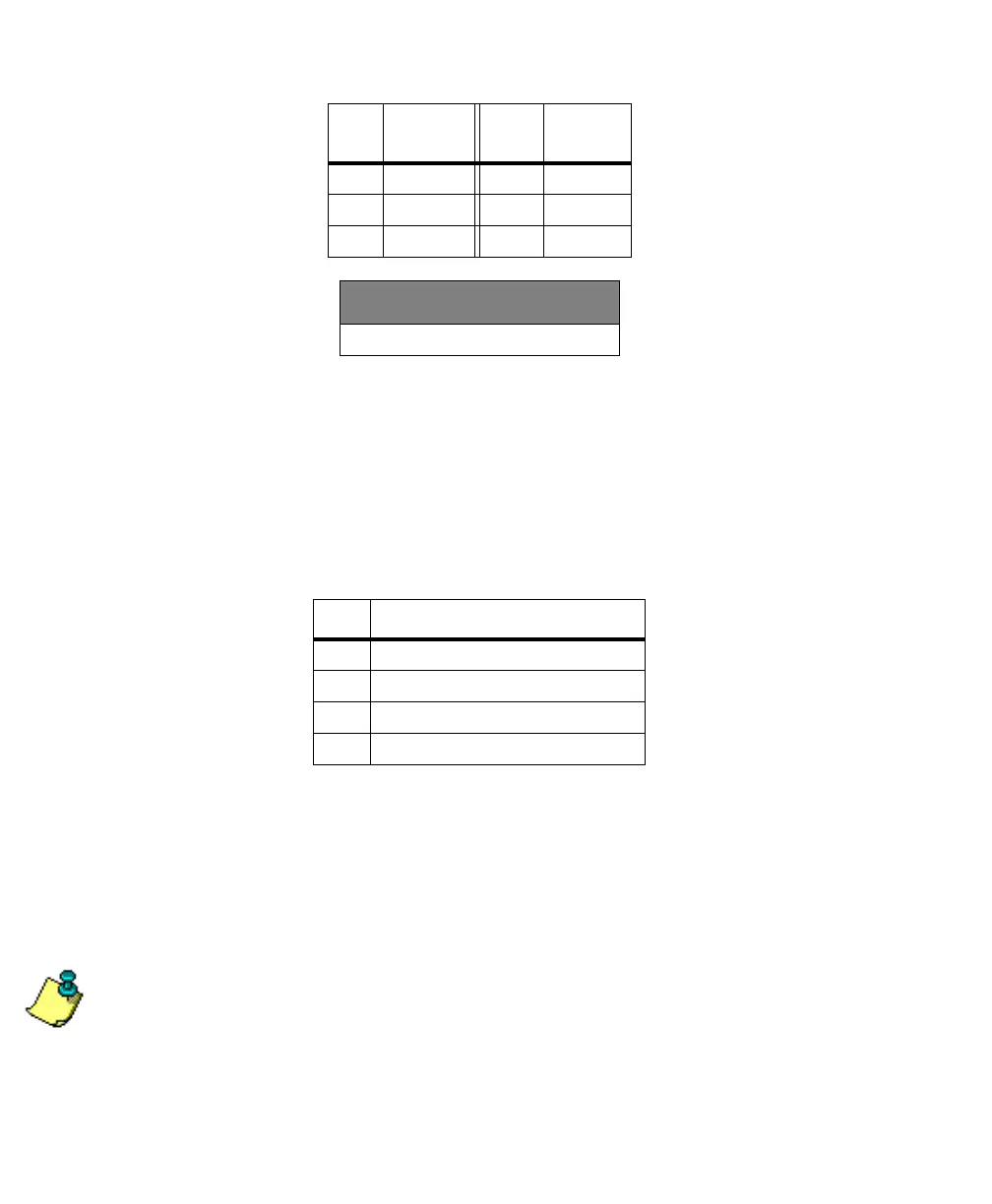
Table 4.34. $PASHS,PSM Fields
X Description
0 No filtering
1 Filtering without kinematic model
2 Filtering with static model
3 Filtering with walking kinematic model
Table 4.33. G12 Baud Rate Codes
Code Baud Rate Code
Baud
Rate
G12RevD.book Page 90 Tuesday, April 2, 2002 4:33 PM