5-27
Chapter 5. DETAILED DESCRIPTION OF EACH FUNCTION
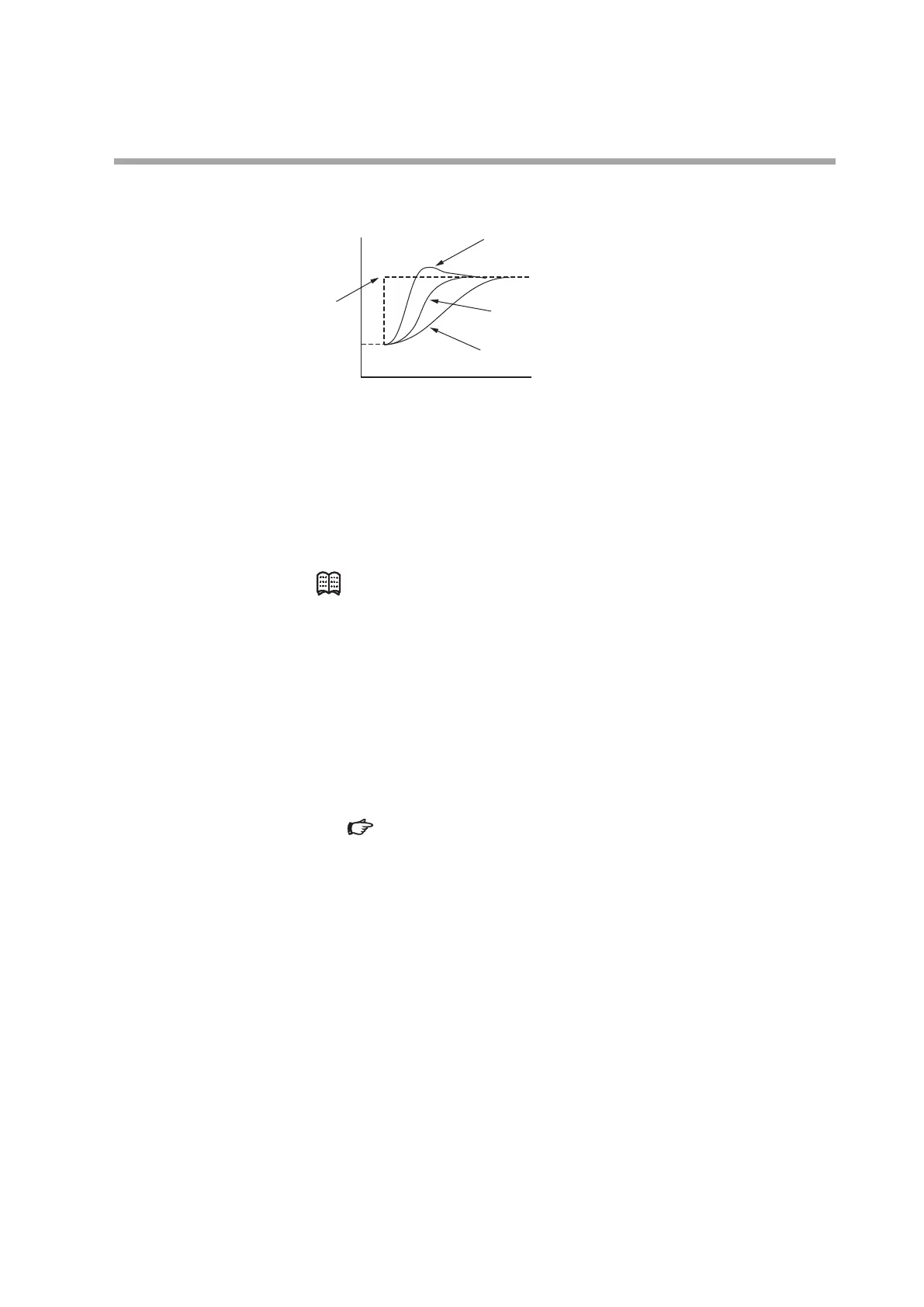
The following figure shows the conceptual diagram expressing differences in
control result using the PID constant calculated by each AT type:
Time
Dierence in PV change when SP is changed.
SP
AT type = 1
(Immediate response)
AT type = 0 (Normal)
AT type = 2 (Stability)
• For the AT Proportional band adjust (
At-P
), AT Integral time adjust (
At-I
),
and AT Derivative time adjust (
At-d
), the value that the PID constant
calculated by the AT is multiplied by each coefficient is written into the set value
of the PID constant. However, the coefficient must be a value in the PID constant
setting range.
Note
• In the Heat/Cool control, it is possible to execute the AT only on the heat or
cool side.
• Setting that the AT is activated for only the heat PID constant in the Heat/
Cool control:
50.0% <MV low limit at AT (
At.OL
) < MV high limit at AT (
At.OH
)
• Setting that the AT is activated for only the cool PID constant in the Heat/
Cool control:
MV low limit at AT (
At.OL
) < MV high limit at AT (
At.OH
) < 50.0%
For details about AT,
Auto tuning (AT) stop/start (p.5-11) and 5 - 4 Auto Tuning (AT)
Function (p.5-29).