PMW20
181
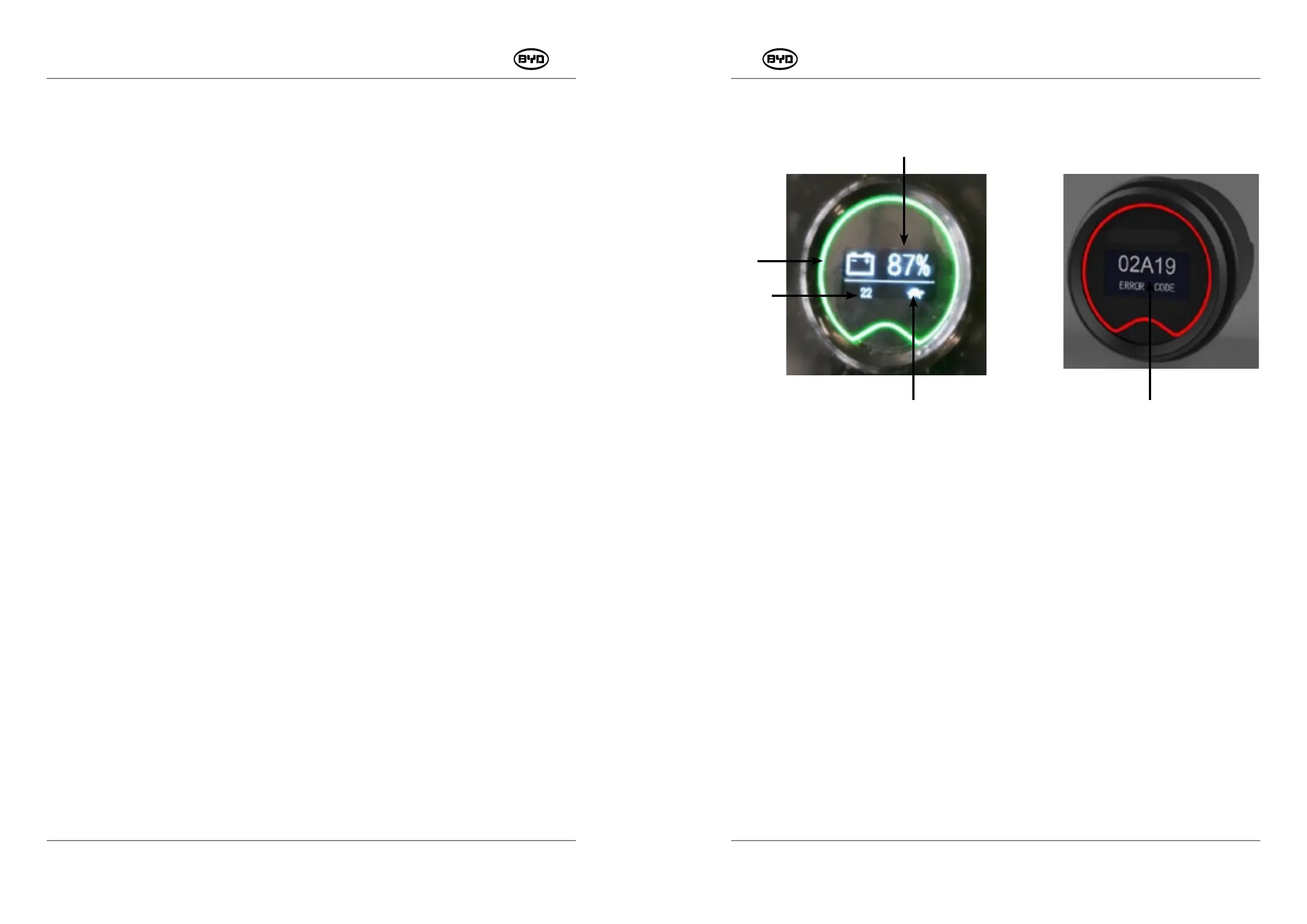
8.9.2.2 Instrument - Dashboard Indicator Lights and Buttons
1) Battery lev
2) Green background when there is no fault, r background and fault code when there is
a fault
3) Display cumulative time when not running; displ driving speed when running
4) Display constant speed rating; light on in the tortoi speed state
5) Green background when there is no fault, r background and fault code when there is
a fault
PMW20
180
8.9.2.1 Driving Function
●When the handle is pressed to the proper position, the handle limit switch is closed and
hole C6 receives a high level signal. The main contactor KM3 will pull in first if it is not in
the pull-in state.
●Manually toggle the handle to move forward or backward, when the main controller
receives the forward or backward switch command and the throttle analog quantity is
within the effective range, the main controller pin B5 / B1 outputs power to the motor
brake and the brake is released. The main controller determines the command speed of
the drive motor according to the value of the throttle analog quantity, and outputs the
current to make the motor reach the command speed. The main controller
synchronously converts the motor speed into kilometers and sends it to the instrument
to display the forklift speed through the CAN bus.
●When the throttle is released or the handle is pressed down to brake, the forklift speed
decelerates to 0 first and the motor brake locks;
●In the above driving process, the motor speed encoder detects the motor speed and
transmits it to the controller, and the motor temperature sensor detects the motor
temperature and transmits it to the controller.
●The speed encoder outputs two pulse signals with a phase difference of 90 °, and
determines the rotation direction of the motor according to the phase sequence of the
two pulse signals; at the same time, it counts the pulse signals fed back by the motor
and calculates the motor speed. The drive motor rotates once, and the encoder outputs
32 pulses.
●The temperature sensor detects the motor temperature and feeds back the signal to the
controller. When the motor temperature is too high, the controller controls the motor to
decelerate or stop.
1
2
3
4 5
SM-PMW202020001-EN
SM-PMW202020001-EN